

A Modeling Method of Approximation Dynamics for Space Rope Robot
A technology of dynamic modeling and robotics, applied in instruments, special data processing applications, electrical digital data processing, etc., can solve problems such as complex models, difficult mathematical models to control system design, and high Young's modulus of tethers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] Below in conjunction with accompanying drawing, the present invention is described in further detail:
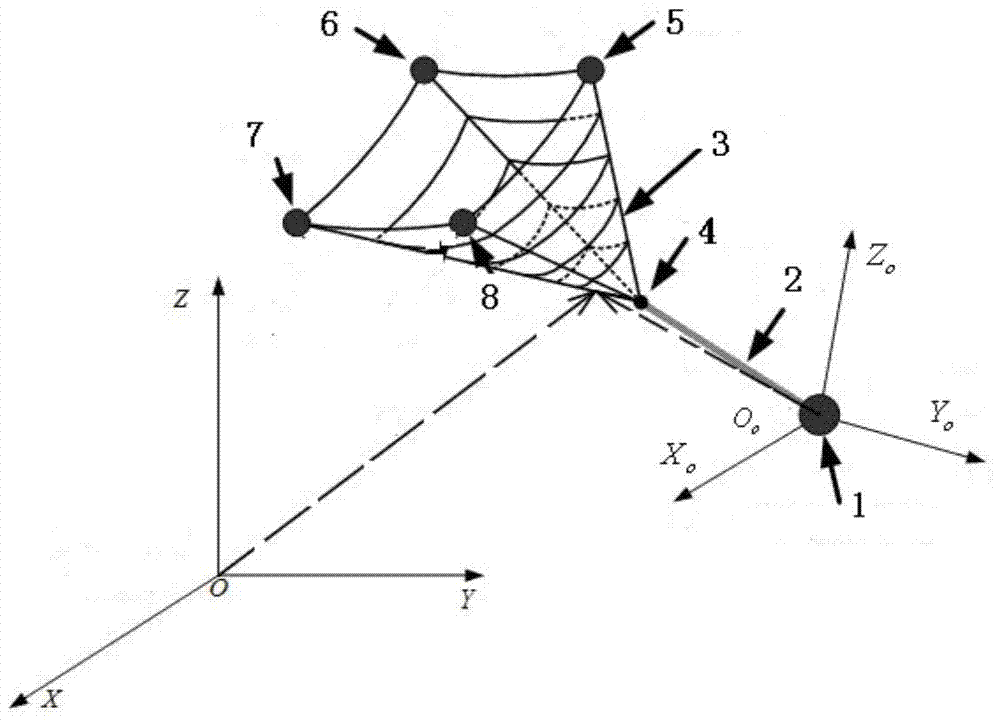
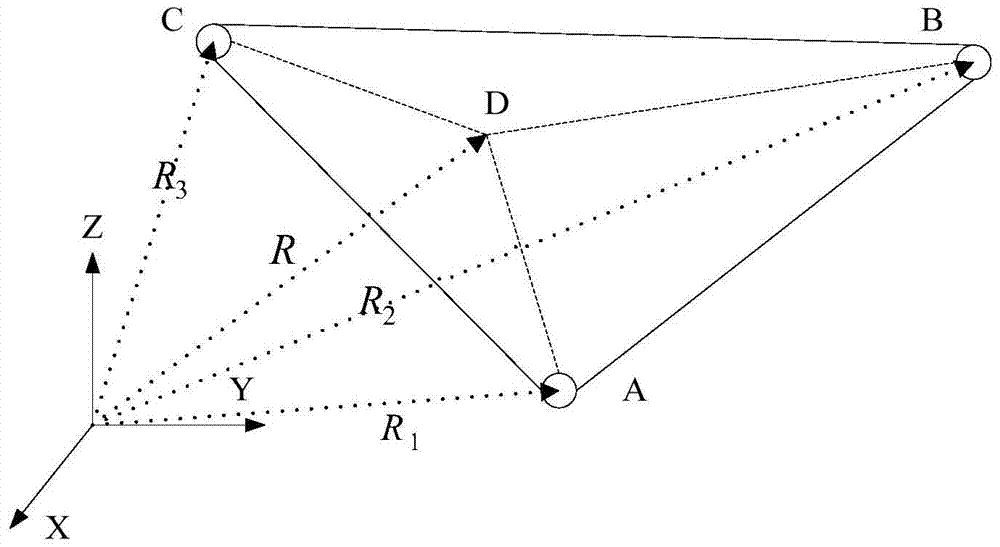
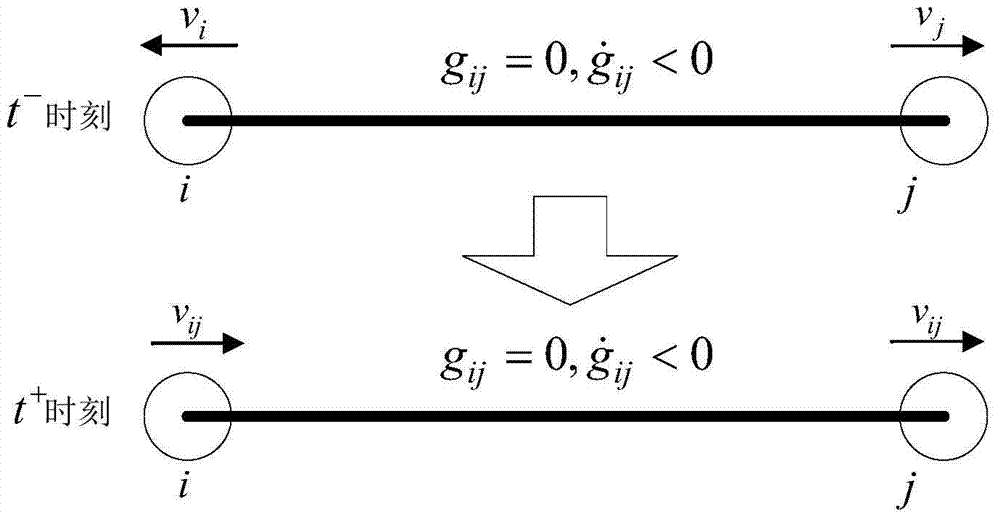
[0097] see Figure 1 to Figure 3 , the approach dynamics modeling method of a kind of space net robot of the present invention, comprises the following steps:
[0098] One: Establish a modeling reference coordinate system and put forward modeling assumptions
[0099] First establish the geocentric inertial system OXYZ, its coordinate origin O is located at the center of the earth, the OX axis points to the vernal equinox of the earth, the OZ axis points to the earth's North Pole, and the OY axis is perpendicular to the OX axis in the equatorial plane; then the orbital coordinate system O is established o x o Y o Z o , its coordinate origin O o Located at the center of mass of the space platform, O o x oThe axis is along the tangential direction of the motorized platform track, pointing to the direction of platform movement, O o Z o Axis and origin O o The li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More