

Point cloud partition method and device
A point cloud and cluster segmentation technology, applied in the field of 3D reconstruction, can solve the problems of difficult ground and non-ground object segmentation, and achieve the effect of avoiding under-segmentation and over-segmentation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
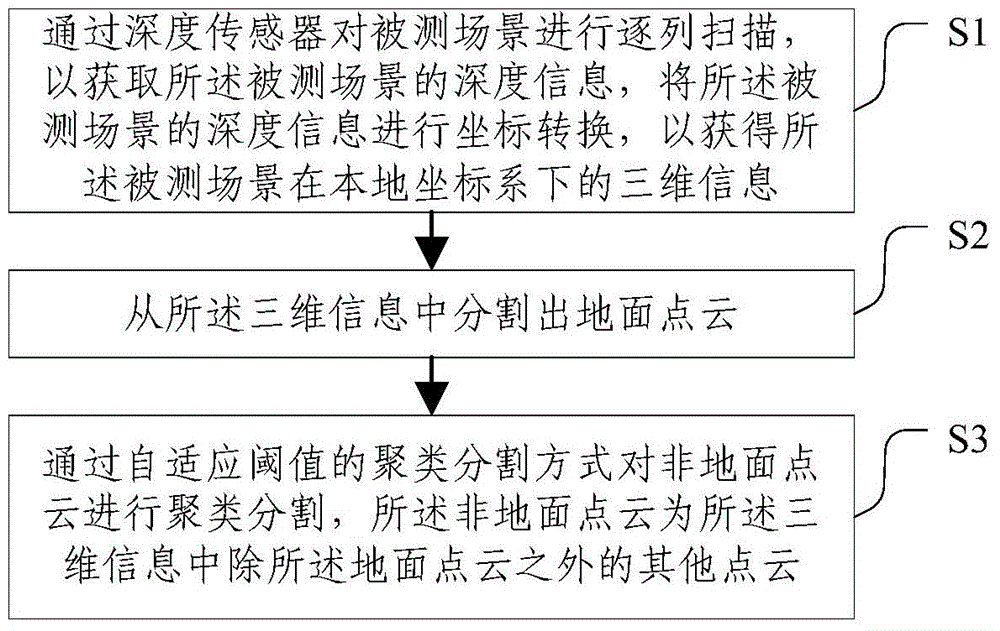
[0121] Analyze data on scanlines such as Figure 5 As shown, it can be seen that the point p 1 to point p a1 , point p a4 to point p a5 is the point cloud data on the ground, point p a2 to point p a3 and point p a6 to point p n is point cloud data on non-ground objects. Combined with the analysis of most scenes, it can be obtained that on a scanning line, most point cloud data belonging to the ground exist in segments and are continuous within segments, such as Figure 5 Midpoint p 1 to point p a1 The point cloud sequence segment, point p a4 to point p a5 The point cloud sequence segment is two segments belonging to the ground; the same segment of the point cloud belongs to the ground, the local fluctuation between points is small, and the elevation difference is also small. Combined with the above analysis, in order to effectively extract the ground point cloud, the point cloud sequence segments belonging to the ground are detected column by column. In each point...
Embodiment 2
[0153] According to the ground segmentation method based on scan lines, after the ground point cloud and the non-ground point cloud are segmented, the non-ground point cloud needs to be clustered and segmented, and the point clouds belonging to different objects in the non-ground point cloud are separated from each other.
[0154] In order to avoid the phenomenon of over-segmentation and under-segmentation of clusters that may occur when using the same fixed threshold, this embodiment adopts an adaptive threshold segmentation method based on volume, that is, based on the relationship between the volume of an object and the threshold required for segmentation, Generally speaking, the distance between large-scale objects (such as buildings) is large, and the threshold value should be larger when segmenting large-volume objects, while the distance between small-volume objects (such as cars) can be smaller. Small, the threshold value should be smaller when segmenting small-volume o...
Embodiment 3
[0166] After clustering and segmenting all non-ground points in the measured scene based on the adaptive threshold radius, due to reasons such as scanning occlusion, rapid steering of the mobile platform, and irregularity of the measured object, the clustering segmentation result will have the phenomenon that the object is over-segmented , there are mainly two types of situations. One is for irregular objects such as trees. Taking trees as an example, since the trunks and branches are relatively small, they can be easily divided into multiple clusters. Among them, only the trunks are clusters on the ground. clusters, while other clusters are suspended above the ground, called suspended clusters. Another is that for large-scale objects such as buildings, due to the small threshold radius setting, when the vehicle-mounted mobile platform makes a sharp turn or scans with occlusions, the large-volume cluster will be over-segmented into multiple clusters. Therefore, it is necessary...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More