

Multi-target tracking method in radar system
A multi-target tracking and radar system technology, applied in the field of multi-target radar tracking, can solve the problems of model error, PHD filtering cannot be directly applied, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
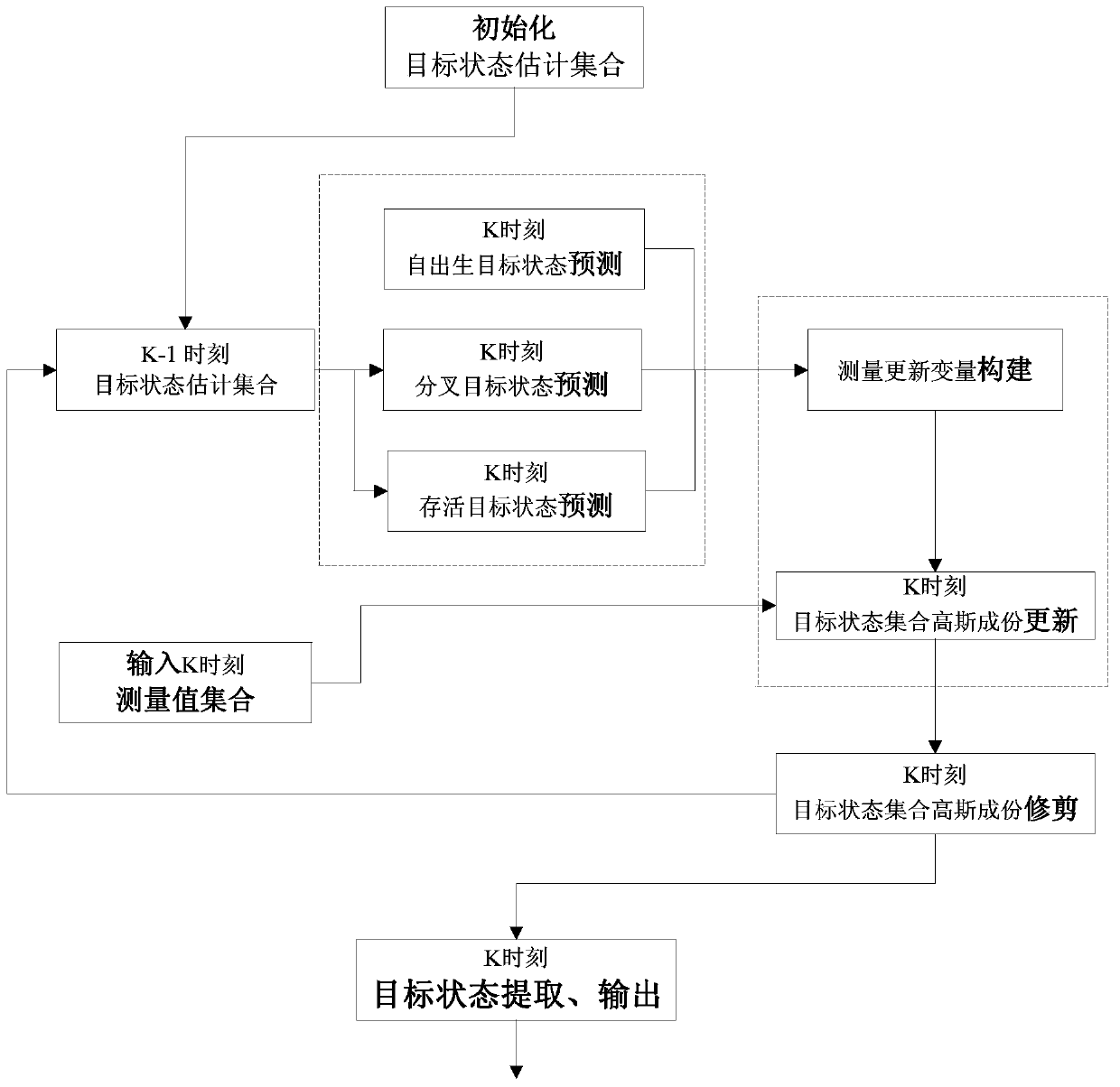
[0060] Multi-target tracking method based on FISST measurement sector time asynchronous in radar system. The specific implementation steps are: assuming that starting from the north direction of the radar, the radar scanning interface is equally divided into N (for example N=36) sectors, as figure 2 As shown in , put the measured values into different sectors according to the azimuth;
[0061] Step 1: Receive the measurement value set of the current nth (n=1, 2, ..., N) sector;
[0062] Step 2: predict the Gaussian term corresponding to the sector target state strength at the current moment according to the Gaussian term of the target state strength at the time corresponding to the previous scan period of the current nth (n=1, 2,..., N) sector; The Gaussian term of the target state intensity at the corresponding moment in the previous scanning period of the two sectors adjacent to the sector, and predict the Gaussian term of the target state intensity at the corresponding ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More