

Isotropic ankle joint rehabilitation parallel connecting mechanism
A homogeneous ankle and ankle joint technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as complex control, waste of power, and unfavorable rehabilitation of patients, so as to solve motion coupling, reduce mutual influence, and realize three-dimensional rotation output in space Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
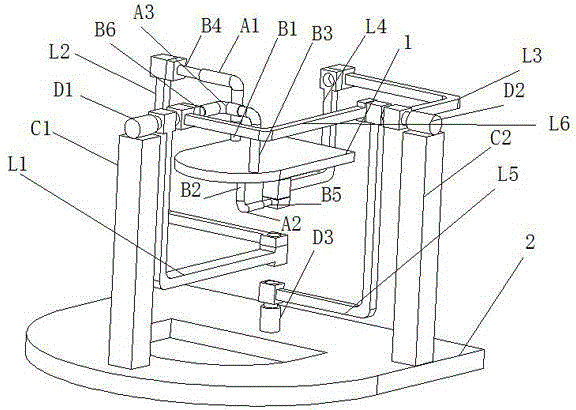
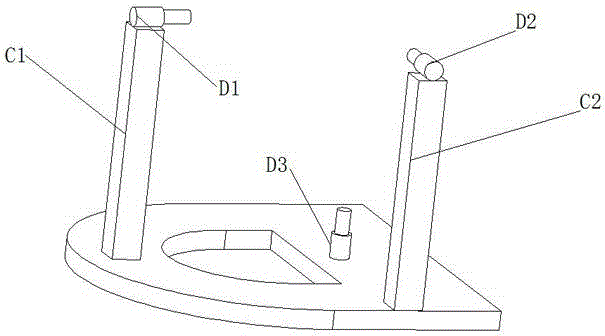
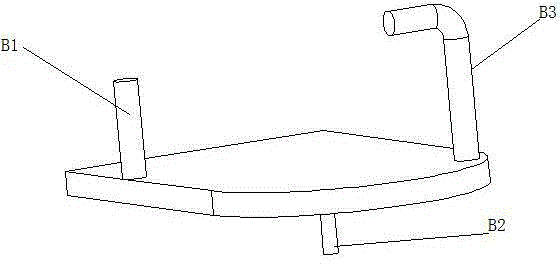
[0033] Such as Figure 1-7 As shown, a parallel mechanism for isotropic ankle joint rehabilitation includes a base 2, a moving platform 1 and a kinematic branch chain. The base 2 is respectively fixed with a first pillar C1, a second pillar C2, two A first motor D1 and a second motor D2 are respectively arranged on the pillar, a third motor D3 is arranged on the base 2, the upper end surface of the moving platform 1 is a tread surface, and the upper end surface of the moving platform 1 is vertically fixed by the second motor. A telescopic rod B1 and an L-shaped third telescopic rod B3, the second telescopic rod B2 is vertically fixed on the lower end surface of the moving platform 1, the first motor D1 communicates with the first motor D1 on the moving platform 1 through the first motion branch chain A telescopic rod B1 is connected to realize...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More