

Parameter optimization-based spacecraft single-pulse drop-shaped fly-around track hover control method
A control method and spacecraft technology, applied in the direction of aerospace vehicle guidance devices, etc., can solve problems such as hovering time is not considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
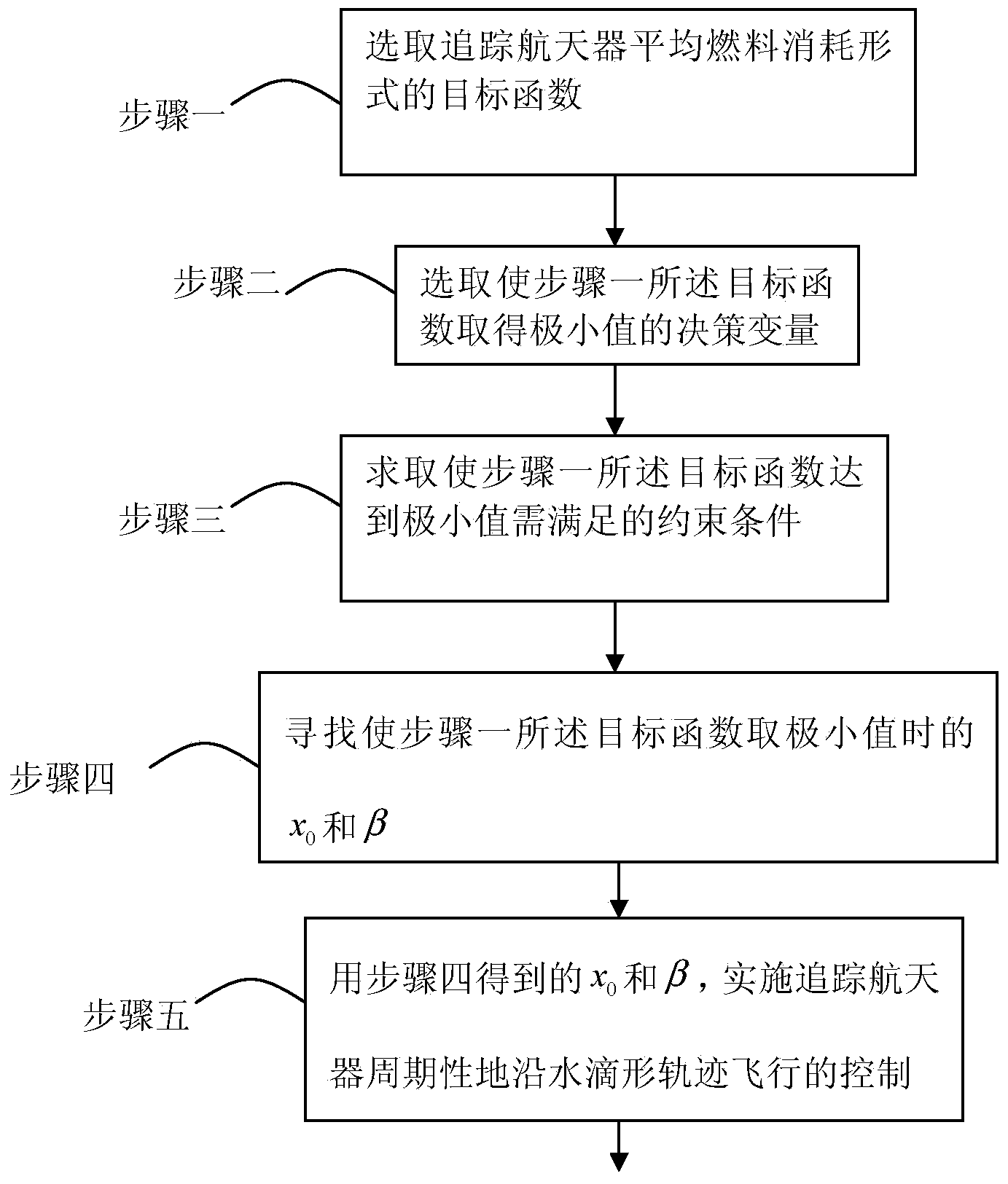
[0059] Specific implementation mode one: combine figure 1 , figure 2 , Figure 14 This embodiment will be described. A hovering control method based on parameter optimization of a spacecraft single-pulse drop-shaped flying trajectory described in this embodiment defines the coordinate system in the method as follows: in the relative coordinate system, that is, the orbital coordinate system s-xyz : The coordinate origin s is fixedly connected with the center of mass of the target spacecraft and moves along the orbit with it, the x-axis and the geocentric vector r of the target spacecraft s Coincident, pointing to s from the center of the earth, the y-axis is perpendicular to the x-axis in the orbital plane of the target spacecraft, and points to the direction of motion, the z-axis and the x-axis, the y-axis form a rectangular right-handed coordinate system; it is characterized in that the method includes the following steps:
[0060] Step 1. In order to consider tracking t...
specific Embodiment approach 2
[0188] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the concrete process of step 4 is:
[0189] keep picking different x 0 and β, using the nonlinear programming method, use the function fmincon in Matlab to track the x-direction component of the position of point A and the period T of tracking the spacecraft's drop-shaped orbit w The ratio β to the orbital period T of the target spacecraft is optimized to obtain the drop-shaped flying trajectory with the least fuel consumption required to track the hovering spacecraft. Other steps are the same as in the first embodiment.
[0190] Simulation
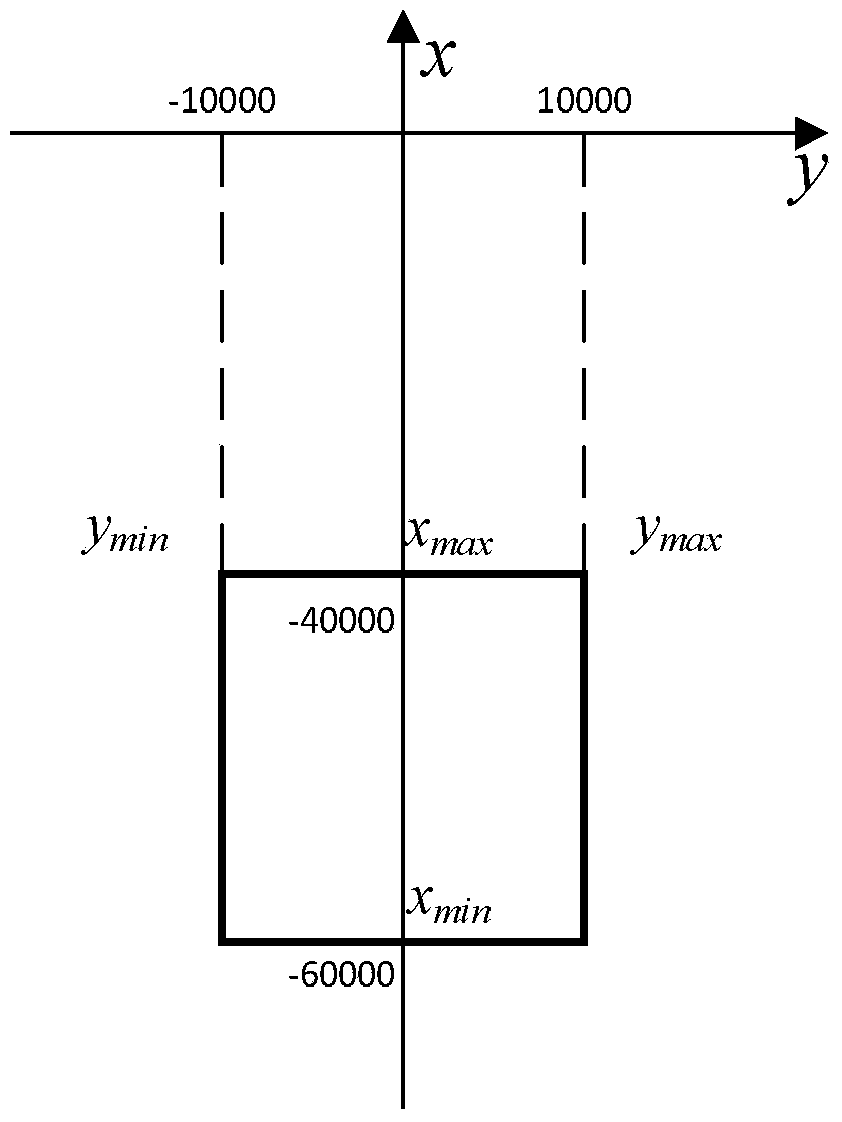
[0191] Assuming that the target spacecraft is in geostationary orbit (GEO), the hovering time is one orbital period, that is, 24 hours, [x min ,x max ,y min ,y max ]=[-60000,-40000,-10000,10000]m square hover position range as an example, such as image 3 shown.
[0192] choose y 0 =0, optimize the initial value to select X 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More