

Wrist rehabilitation robot
A rehabilitation robot and wrist joint technology, applied in the field of medical rehabilitation robots, can solve the problems of ignoring the importance of single joint rehabilitation treatment, research on power-assisted rehabilitation training equipment, lack of wrist joint rehabilitation robots, etc., to achieve simple structure, high manufacturing and processing performance Good, low processing cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
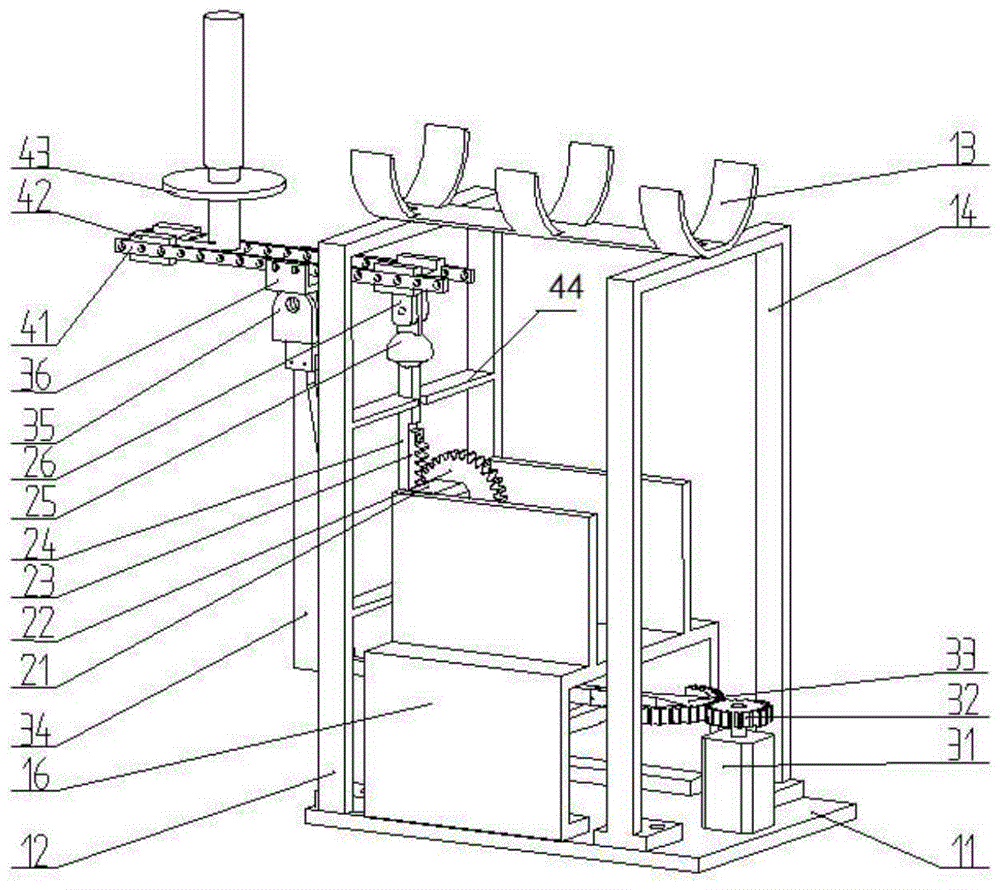
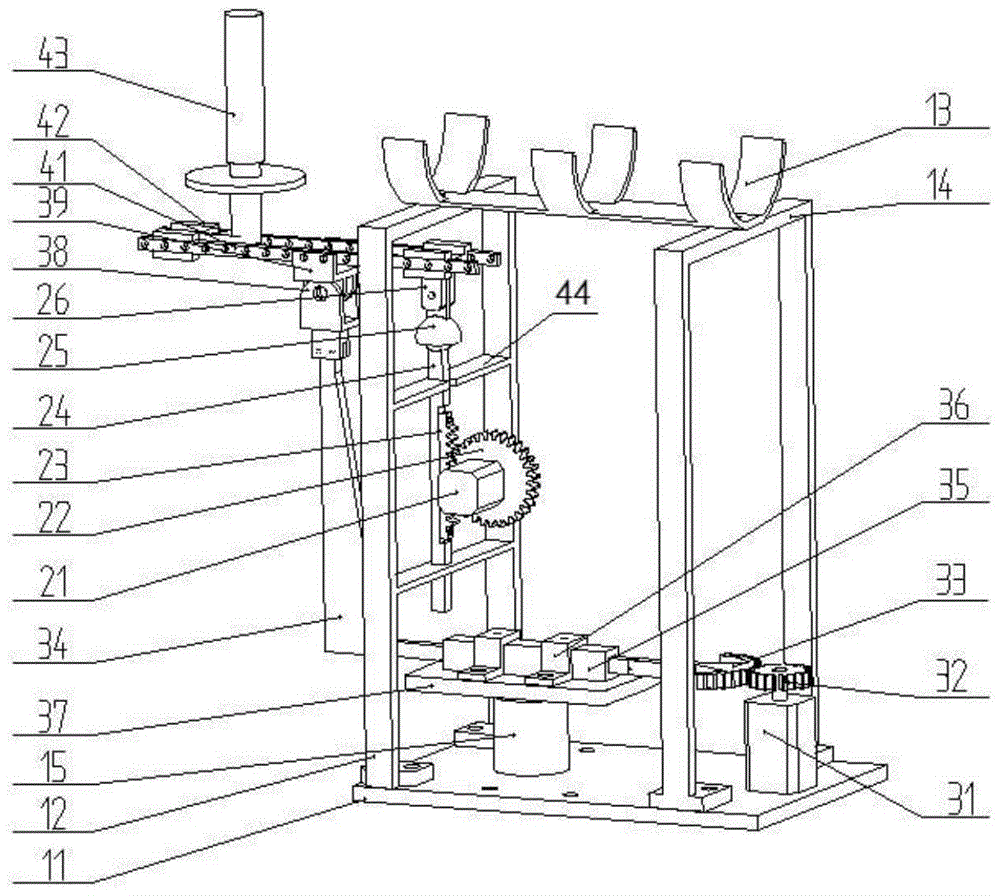
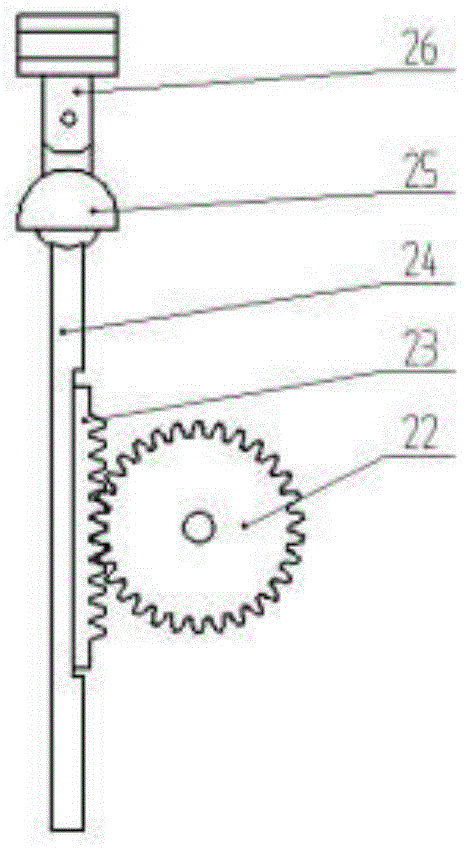
[0021] A power-assisted two-degree-of-freedom wrist joint rehabilitation robot mentioned in the present invention is a power-assisted two-degree-of-freedom wrist joint rehabilitation robot, which includes a base, a joint flexion and extension branch chain, a joint retraction branch chain and an execution branch chain. Among them, the base includes a large support platform 11, an arm front bracket 12, a half-wrapped frame for the forearm 13, an arm rear bracket 14, a small support platform bracket 15, and a machine cover 16; Flexion and extension gear 22, rack 23, ball head square rod 24, half-wrapped ball connector 25, ball pair slider 26; joint extension and extension branch chain includes wrist joint extension motor 31, wrist joint extension gear 32, arc gear 33. L-shaped connecting rod 34, slide block 35, slide block fixing part 36, small support platform 37, joint hinge part 38, revolving joint 39;
[0022] Large support platform 11 bottom surface has some through holes, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More