

Quick judging method for singular configuration of six-degree-of-freedom mechanical arm
A technology of robotic arms and degrees of freedom, applied in manipulators, manufacturing tools, etc., can solve the problems of large computational load, unfavorable real-time avoidance of singular control of industrial manipulators, etc., to achieve the effect of simple judgment process and guaranteed judgment speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
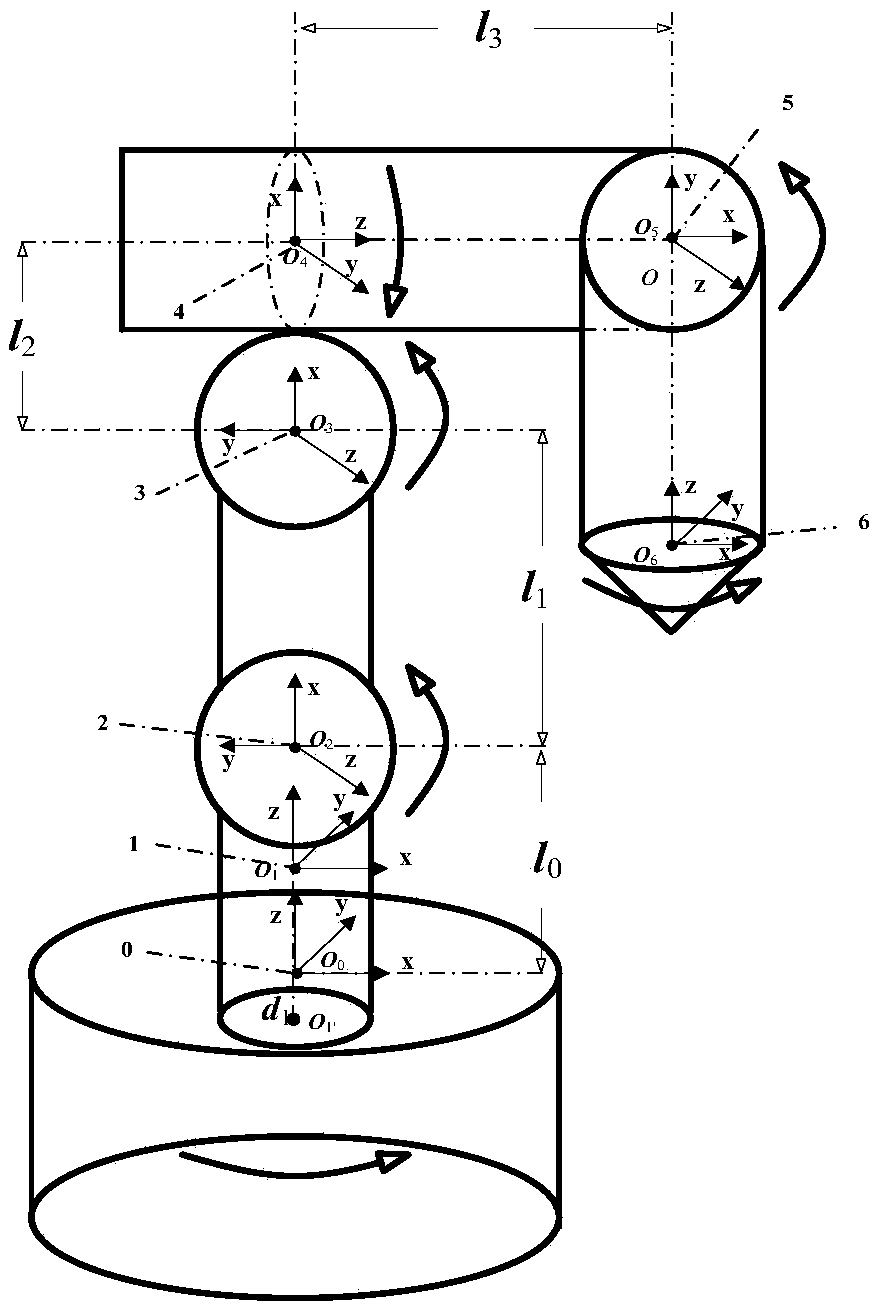
[0017] The present invention will be described in more detail below in conjunction with accompanying drawing example:
[0018] The judgment idea proposed by this method can be applied to the same type of six-degree-of-freedom manipulator. This method can greatly meet the requirements of speed and accuracy in real-time singularity avoidance control of industrial manipulators.
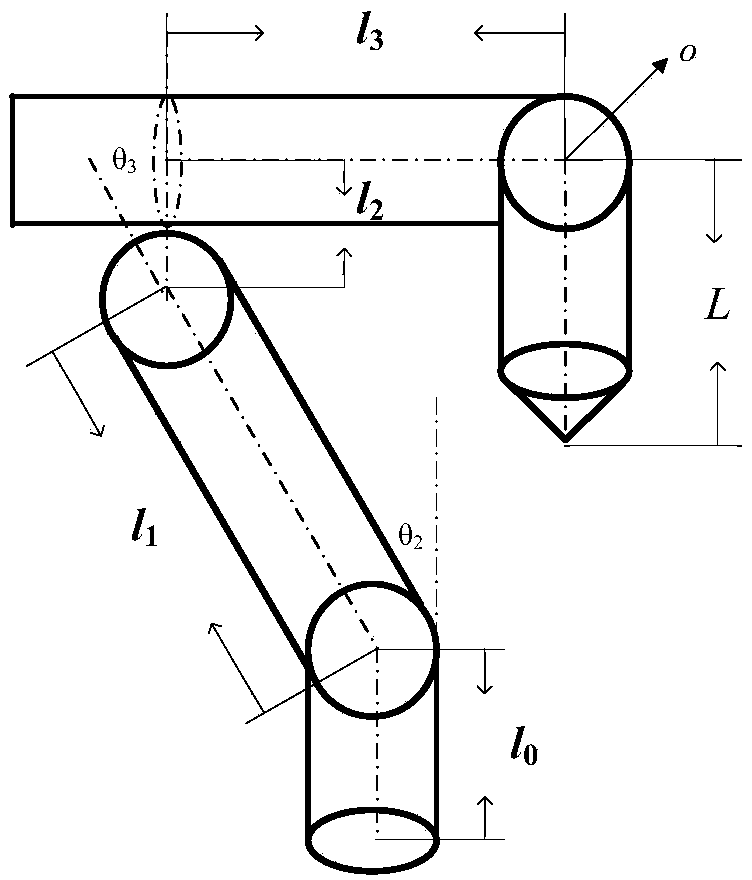
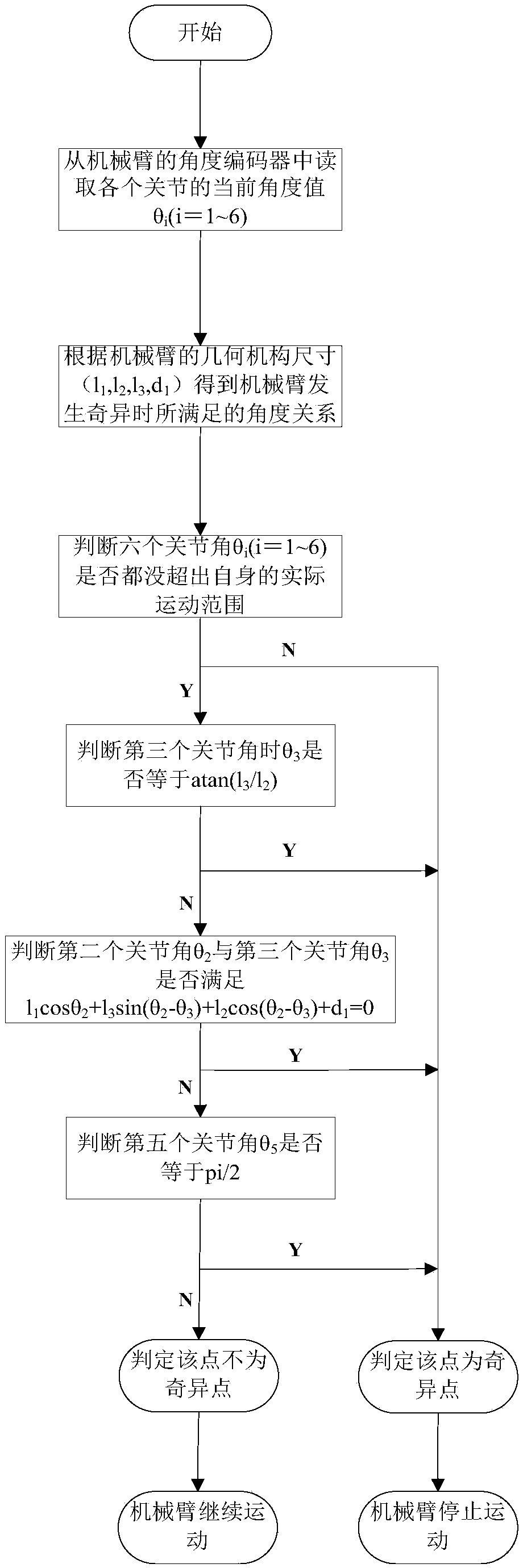
[0019] Most of the other inventions on this problem are realized by calculating the singular value of the Jacobian matrix, while the method proposed by the present invention applies the plane geometry method to the judgment of the singular configuration of the manipulator. Theoretically, the method proposed by the present invention has no error, which can ensure the judgment accuracy of the singular configuration of the six-degree-of-freedom manipulator, and the judgment process proposed by the present invention is much simpler than obtaining the singular value of the Jacobian matrix , which can ensure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More