

3D printing robot based on industry manipulator
A technology of industrial manipulators and industrial robots, applied in manipulators, manufacturing tools, etc., can solve the problems of slow printing speed, inability to install the print head, free printing, etc., and achieve the effect of expanding the printing space and printing flexibility
Inactive Publication Date: 2015-03-18
郑西涛
View PDF8 Cites 19 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0002] At present, the size of objects printed by 3D printers at home and abroad is limited by the size of the printer, and the printing speed is slow
However, the existing 3D printing robot cannot install the print head to the end of the manipulator for free printing due to poor repeat positioning. The robot part can only be used separately from the 3D printer for batch processing and assembly of printed parts.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
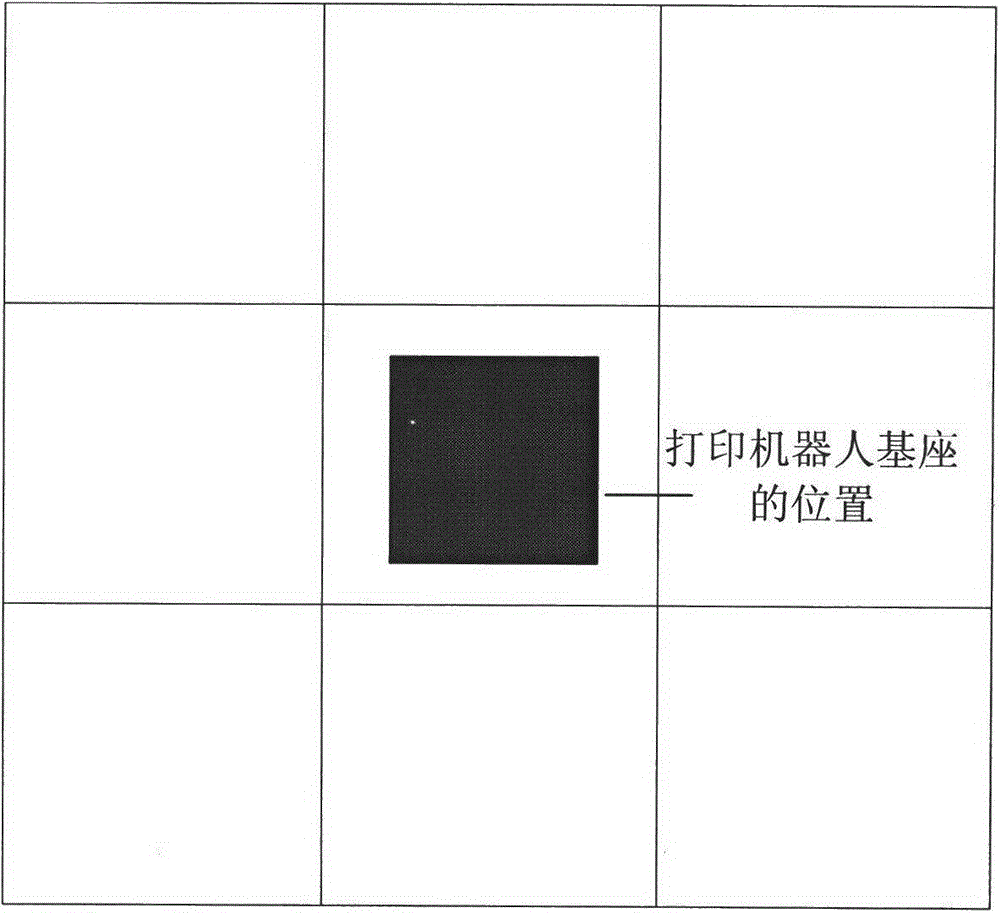
[0010] 1. System initialization, reposition the base of the printing robot.
[0011] 2. The computer loads the 3D drawing and starts the printing task.
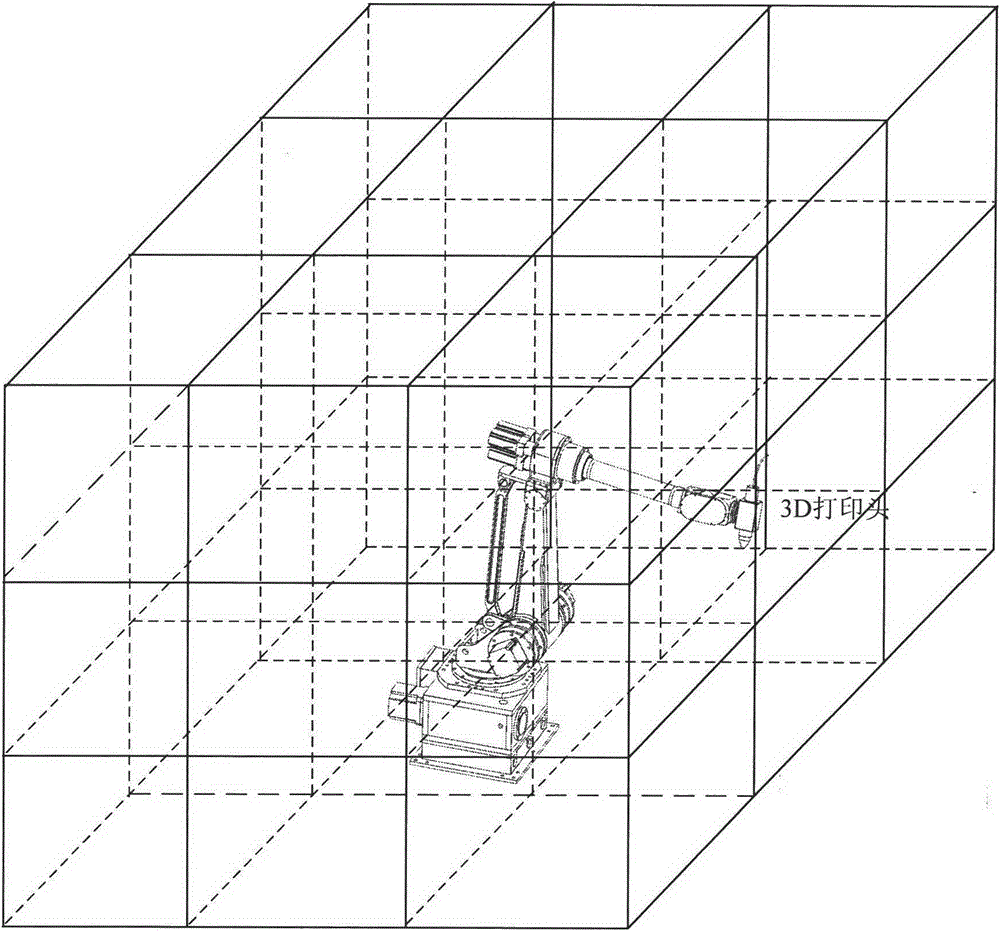
[0012] 3. When printing large objects, the system can automatically lay guide rails, print space by space, and perform automatic fusion.
[0013] 4. When the printing material is lower than the lower limit of the material capacity, the system will automatically prompt that the material is insufficient.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
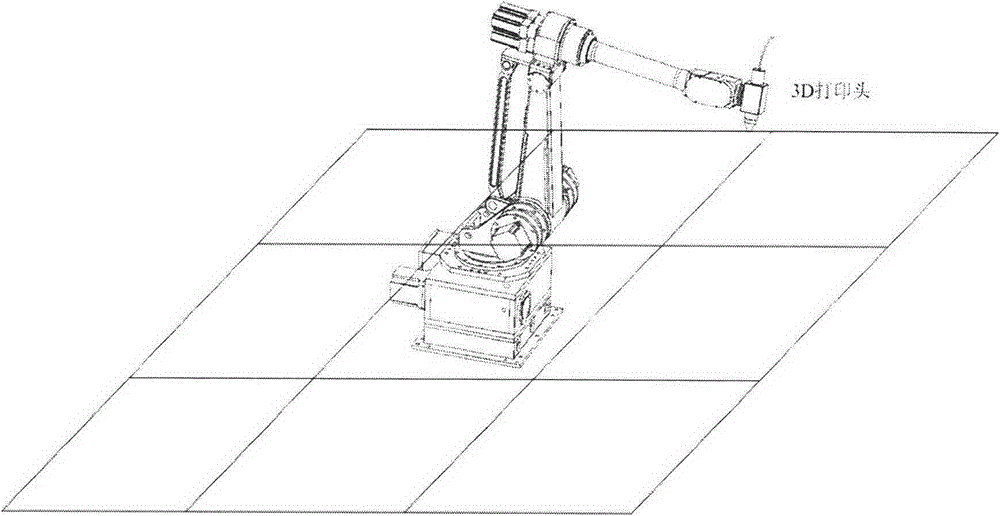
The invention discloses a 3D printing robot based on an industry manipulator, is the combination of the conventional 3D printing technology and the industry robot and is characterized in that a printing head is mounted at the end of a multi-shaft manipulator of a robot, the printing repeated positioning accuracy is high, and the printing mode is not limited by the space. The size of the object to be printed is limited by the size of the conventional 3D printer and the printing speed is slow. The repeated positioning accuracy of the existing 3D printing robot is poor and the printing head cannot be mounted at the end of the manipulator, the robot is separated from the 3D printer for batch processing and assembling the printed pieces. The printing material is not limited, the size and shape of the printed object are not limited while the printing speed is faster than the conventional 3D printer.
Description
technical field [0001] The invention belongs to the field of 3D printing and industrial robots, and relates to a 3D printing robot based on an industrial manipulator, which is a combination of traditional 3D printing technology and industrial robots, and the size, shape and printing materials of printed objects are not limited. Background technique [0002] At present, the size of objects printed by 3D printers at home and abroad is limited by the size of the printer, and the printing speed is slow. However, the existing 3D printing robot cannot install the print head to the end of the manipulator for free printing due to poor repeat positioning. The robot part can only be used separately from the 3D printer for batch processing and assembly of printed parts. The invention installs the 3D printing head at the end of the multi-axis manipulator of the robot, the printing method is not limited by space, the size and shape of the printed object are not limited, the printing mate...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J11/00B25J5/02
Inventor 郑西涛
Owner 郑西涛