

Handheld laser three-dimension scanning method and handheld laser three-dimension scanning equipment based on mark point trajectory tracking
A technology of trajectory tracking and scanning method, applied in the field of 3D scanning, which can solve the problems of poor smoothness and low precision of moving stitching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings.
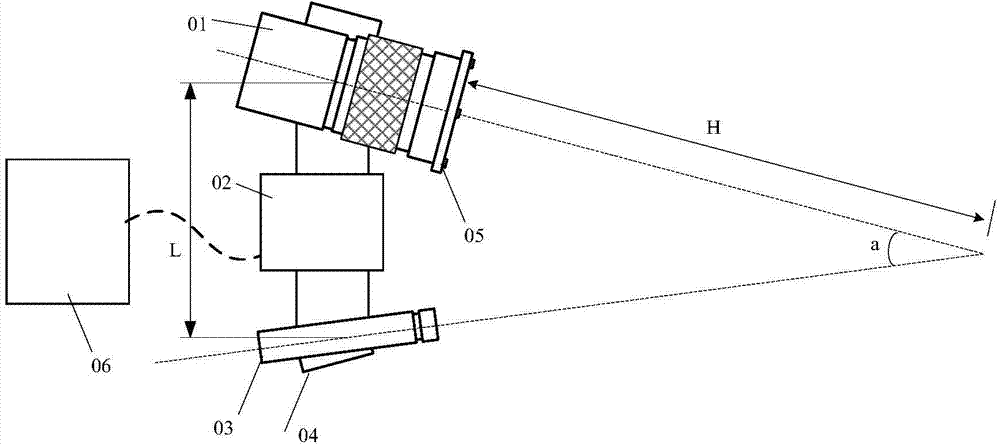
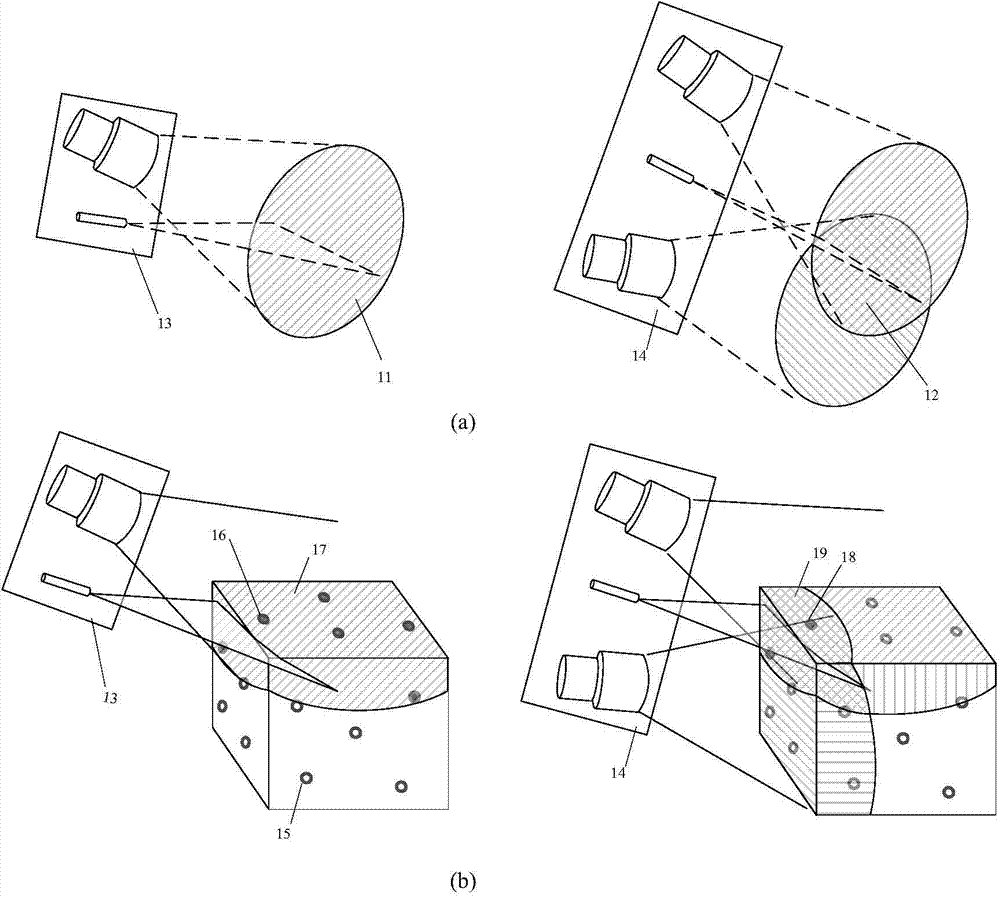
[0038] refer to Figure 1 to Figure 12 , a hand-held laser three-dimensional scanning method based on single-camera marker track tracking, the scanning method comprising the following steps:
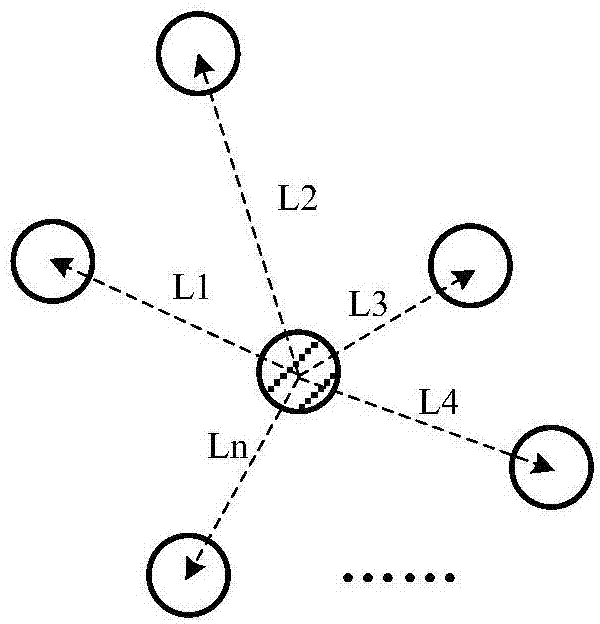
[0039] 1) Identify and extract the two-dimensional position information of the marker points in the images captured by a single working camera, predict the target position in the current frame according to the motion trajectory of the marker points in the previously set number of frames, and then search around the target position to obtain It corresponds to the marker point, and establishes the preliminary matching relationship between the marker point in the current frame and the original marker point library;
[0040] 2) Calculate the current relative coordinate system of the instrument by using the initial matching relationship between the markers in the current frame and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More