

Servo control method and system of two-axis four-frame optoelectronic pod
A photoelectric pod and voltage control technology, applied in the field of servo control, can solve problems such as complex control technology and linkage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
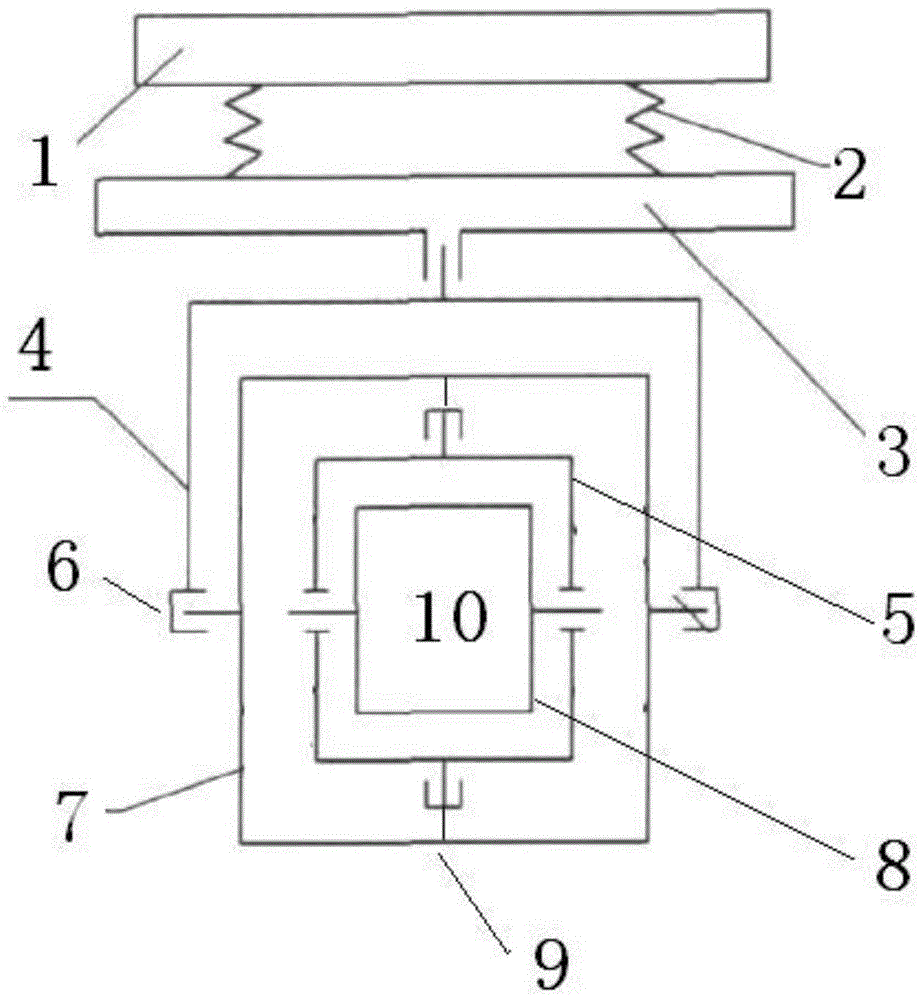
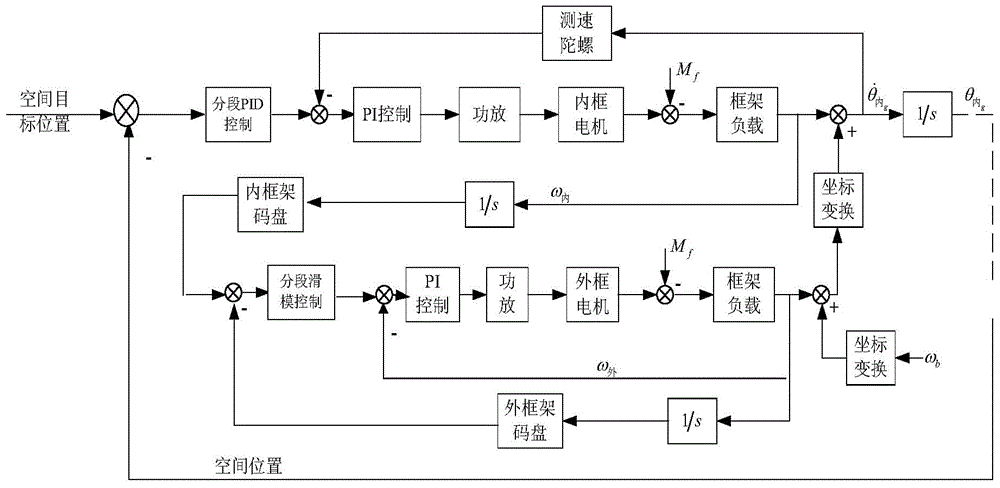
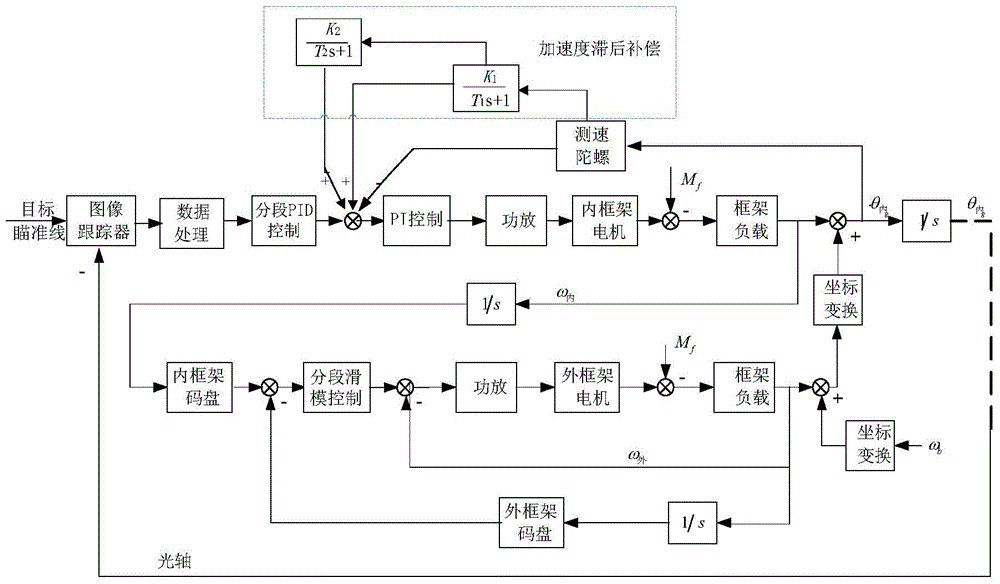
[0094] A servo control method for a two-axis four-frame airborne photoelectric pod. The photoelectric pod is composed of two axis systems, an azimuth axis and a pitch axis. The azimuth axis includes an inner azimuth frame and an outer azimuth frame, and the pitch axis includes an inner pitch frame and an outer frame. Pitching frame; the photoelectric pod passes through such as figure 2 , 3 The following methods are shown to achieve high-precision and high-stability photoelectric tracking control:
[0095] (1) The inner frame executes the designed inner frame position loop tracking control algorithm to obtain the inner frame speed loop control amount, and substitutes the speed loop control amount into the gyro speed loop stabilization loop to obtain the corresponding DA port voltage control amount, and the D...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More