

Full-automatic parking system and parking method thereof
A technology of a parking system and a parking method is applied in the field of unmanned vehicles to achieve the effects of convenient operation, convenient use and good accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0064] When the processing chip executes the warehousing operation according to the left azimuth storage path, it includes the following steps: wherein X1 is the component of the total driving route of the car in the left azimuth storage path in the X direction, and Y1 is the component of the left azimuth storage path. The component of the total driving route of the car in the library path in the Y direction;
[0065] 1) The processing chip controls the tires to turn left through the steering subsystem, and controls the engine subsystem to start. The arc length of the car is 1 / 3*X1 in the X direction, and 1 / 3*Y1 in the Y direction. , execute step 2;
[0066] 2) The processing chip controls the tires to turn back to the positive direction through the steering subsystem. The arc length of the car is 1 / 3*X1 in the X direction, and 1 / 3*Y1 in the Y direction. Go to step 3 ;
[0067] 3) The processing chip controls the tires to turn right through the steering subsystem. The arc le...
Embodiment 2
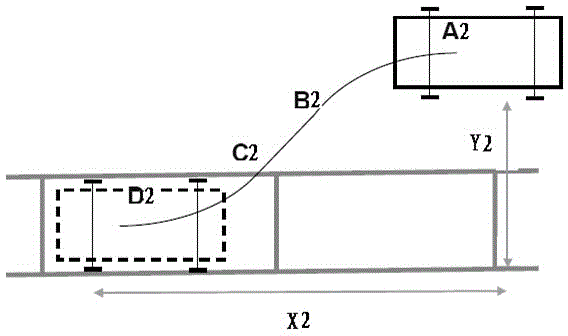
[0071] Such as image 3 As shown, when the processing chip executes the warehousing operation according to the right azimuth storage path, it includes the following steps: wherein X2 is the component of the total driving route of the car in the right azimuth storage path in the X direction, and Y2 is the right The component of the total driving route of the vehicle in the Y direction in the lateral orientation storage path;
[0072] 1) The processing chip controls the tires to turn right through the steering subsystem, and controls the engine subsystem to start. The arc length of the car (arc length A2B2) satisfies that the component in the X direction is 1 / 3*X2, and the component in the Y direction is 1 / 3*Y2, go to step 2;
[0073] 2) The processing chip controls the tires to turn back to the positive direction through the steering subsystem. The arc length of the car (arc length B2C2) satisfies that the component in the X direction is 1 / 3*X2, and the component in the Y dire...
Embodiment 3
[0088] When the processing chip performs the warehousing operation according to the left vertical orientation warehousing path, it includes the following steps: wherein X3 is the component of the total driving route of the car in the left vertical orientation warehousing path in the X direction, and Y3 is the component of the left vertical orientation warehousing path. The component of the total driving route of the car in the library path in the Y direction;
[0089] 1) The processing chip controls the tires to turn left through the steering subsystem, and controls the engine subsystem to start. The horizontal distance of the car is 1 / 2* X3, and the step 2 is executed;
[0090] 2) The processing chip continues to control the tires to turn left through the steering subsystem. The arc length of the car is 1 / 2*X3 in the X direction and 1 / 2*Y3 in the Y direction. Execute the steps 3;
[0091] 3) The processing chip controls the tires to turn back to the forward direction through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More