

A Robotic Scene Recognition Method Based on Scale Invariant Feature Extreme Learning Machine
A scale-invariant feature, extreme learning machine technology, applied in the field of image recognition, can solve problems such as inability to recognize and match images, large original dimensions of images, etc., and achieve the effect of solving the training speed is too slow
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0055]In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
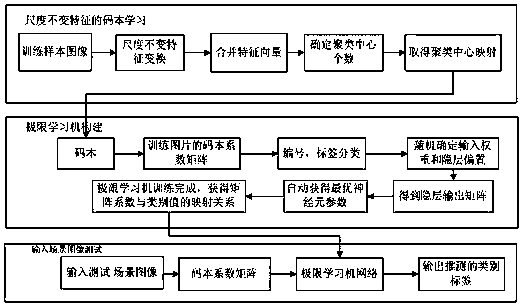
[0056] A robot scene recognition method based on a scale-invariant feature extreme learning machine, comprising the following steps:
[0057] Step 1, in the embodiment, the images are used to randomly select 500 pictures from the ImageCLEF library. 450 of them are used as training samples and 50 are used as testing samples. We first enhance and normalize the image to obtain a standardized image with the same size and the same gray value.
[0058] Step 2: Scale-invariant feature conversion is performed on the training images, and the scale-invariant features of all training images are combined to form a new matrix set. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More