

Method and experimental facility for analyzing and controlling vibration characteristics of flexible joint and flexible armed lever
An experimental device and flexible joint technology, applied in the field of robotics, can solve problems such as single function, and achieve the effect of improving control performance and convenient operation
Image

Examples
Embodiment Construction
[0028] Specific embodiments of the present invention are described with reference to the above drawings.
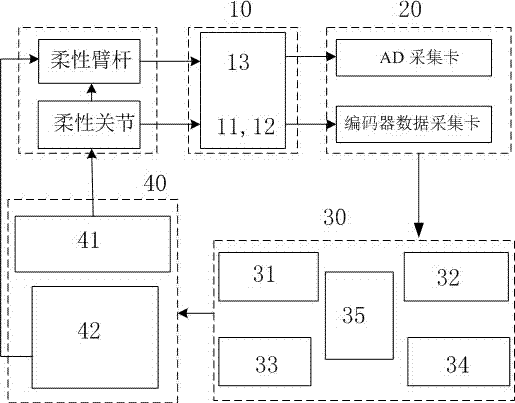
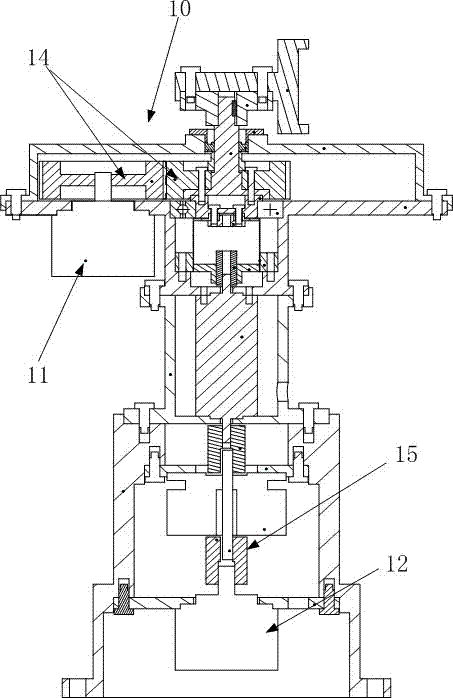
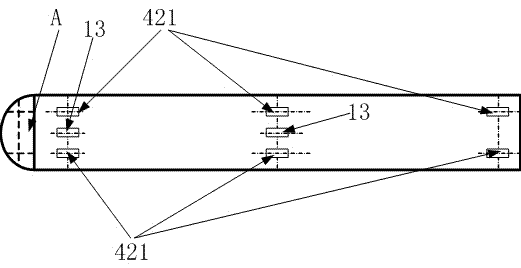
[0029] Depend on Figure 1 to Figure 6It can be seen that the experimental device for the analysis and control of the vibration characteristics of the flexible joint flexible arm of the present invention is characterized in that the experimental device includes a sensor detection unit 10 connected in sequence, a data acquisition and processing unit 20 and a host computer 30, wherein the sensor detection The unit 10 includes a first encoder 11 connected to the output end of the flexible joint, a second encoder 12 connected to the output end of the joint drive motor, and a first sensor 13 arranged on the flexible arm. The first encoder 11, the second The encoder 12 and the first sensor 13 are respectively connected to the data collection and processing unit 20 . The first encoder 11 is connected to the output end of the flexible joint through two transmission gears 14 with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
- IPC
- G01H17/00
- Inventors
- 徐文福; 杨益波