

Follow-up type nasal endoscopic surgery assistant robot
A nasal endoscope and robot technology, applied in the field of medical devices, can solve problems such as operation limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. It should be noted that the terms “first”, “second”, etc. involved in the description are used to distinguish components with the same function, and do not limit the scope of protection.
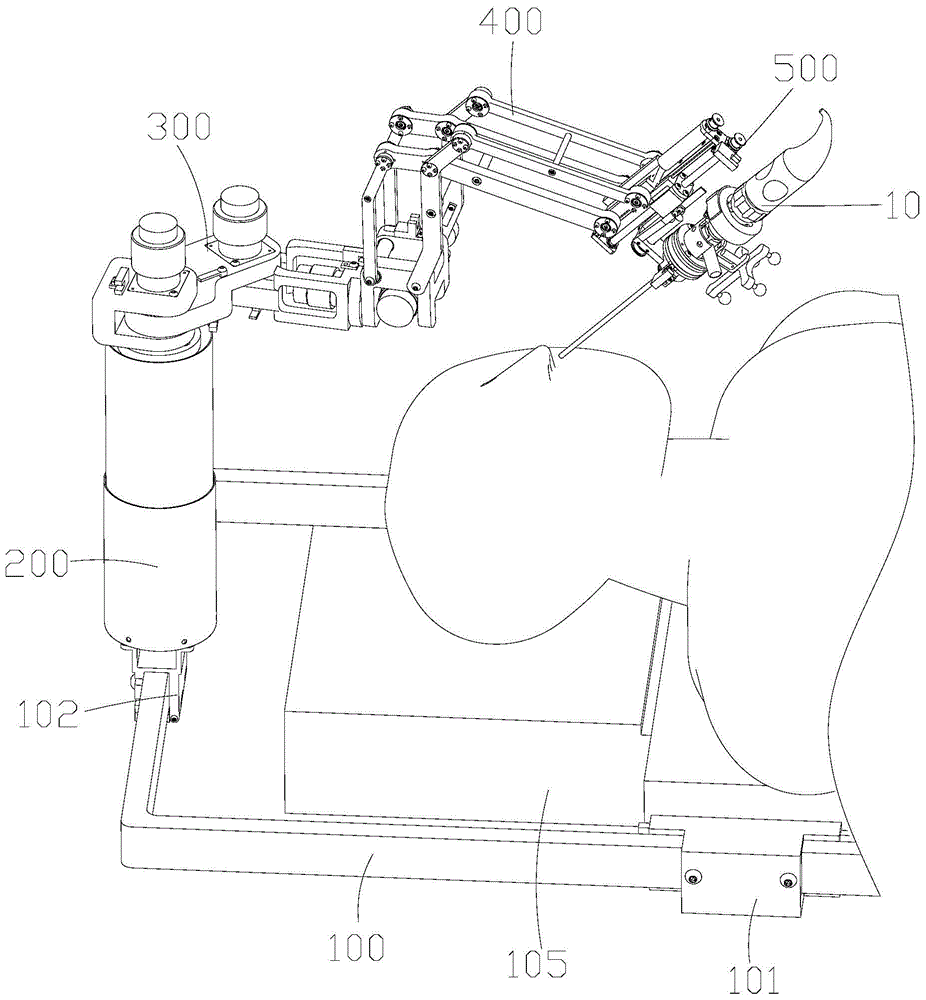
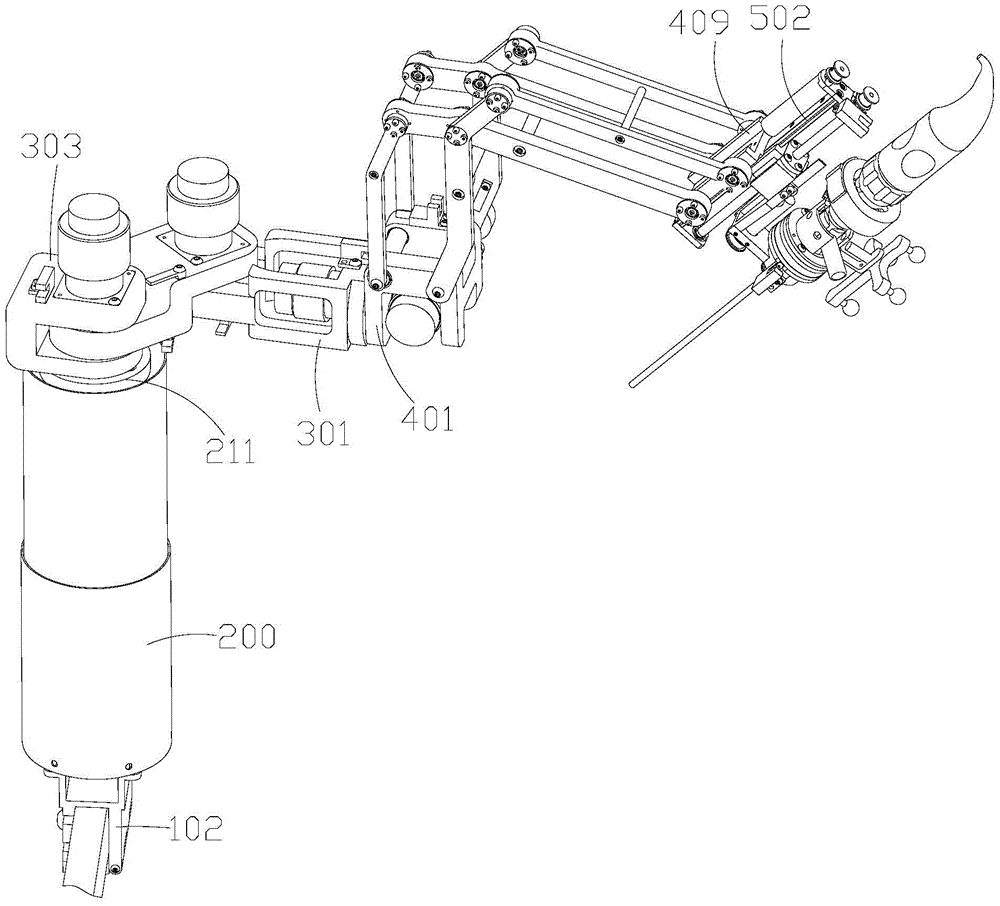
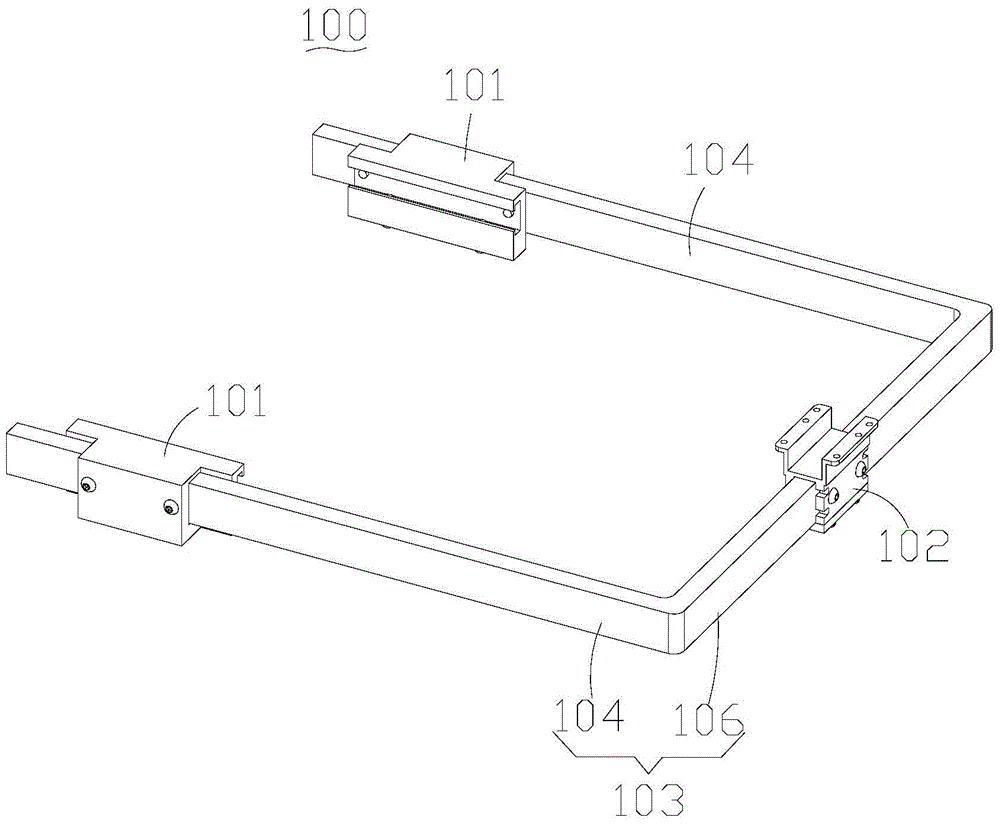
[0028] see figure 1 and figure 2 , the follow-up nasal endoscopic surgery auxiliary robot provided by the embodiment of the present invention includes a guide rail adapter 100 that can be adapted to the guide rails of different operating beds 105, connected to the guide rail adapter 100 and perpendicular to the operating bed 105 The automatic lifting mechanism 200 that lifts up and down in the direction of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More