

Navigation error correction method based on magnetic nail location
一种误差修正、磁钉的技术,应用在AGV导航领域,能够解决易受干扰、应用成本高、要求高等问题,达到环境适应性强、应用设备成本低、定位准确的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
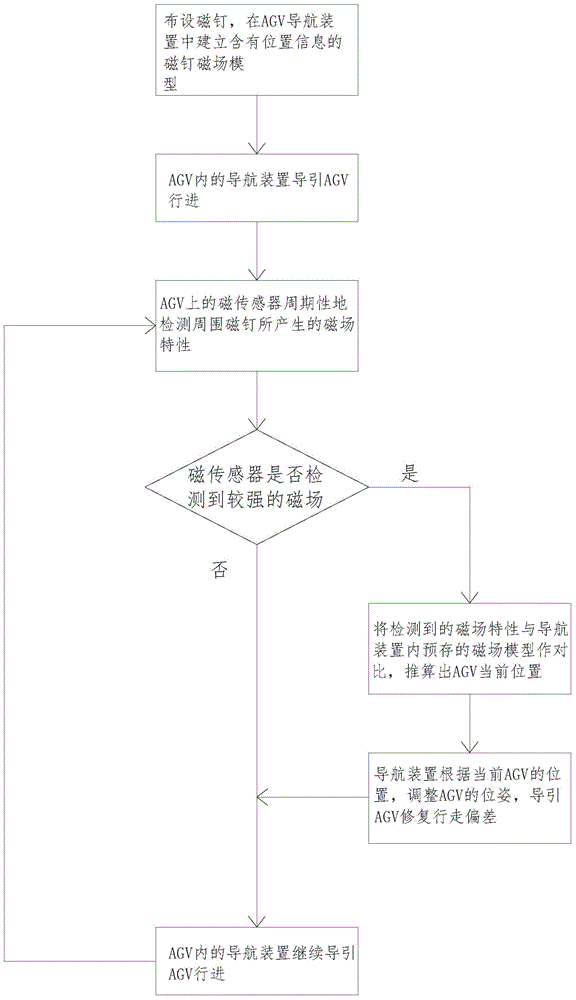
[0019] see figure 1 , a kind of navigation error correction method based on magnetic nail positioning provided by the present invention, comprises the following steps:
[0020] (a) Arrange magnetic nails in the area where the AGV travels, establish a magnetic field model according to the magnetic field formed by the magnetic nails, and store it in the navigation device of the AGV;
[0021] (b) The navigation device in the AGV guides the AGV;
[0022] (c) The magnetic sensor on the AGV detects the magnetic field characteristics generated by the magnetic nail on the AGV travel track;
[0023] (d) Compare the magnetic field characteristics detected by the magnetic sensor with the pre-stored magnetic field model in the navigation device, and calculate the relative positional relationship between the magnetic nail and the AGV;
[0024] (e) Calculate the current position of the AGV according to the position of the magnetic nail;
[0025] (f) The navigation device adjusts the pose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More