

Global path planning method and system for inspection robot based on topology point classification
A global path planning and inspection robot technology, applied in two-dimensional position/channel control and other directions, can solve the problems of reducing path planning calculation and storage consumption, etc., to reduce the number of topology points, simple calculation method, and wide application range Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
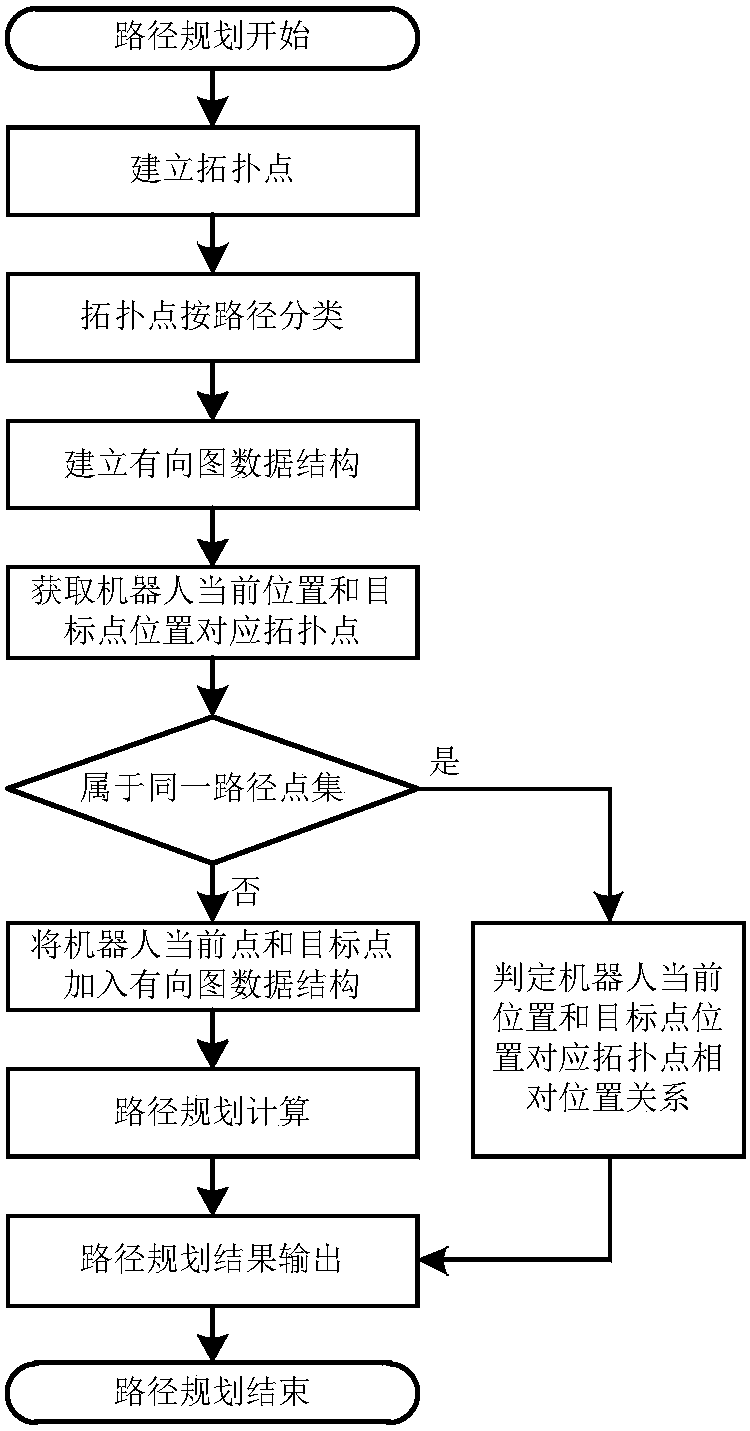
[0047] Such as figure 1 Shown, the present invention proposes a kind of path planning method based on topological point classification, and this method comprises the following steps:
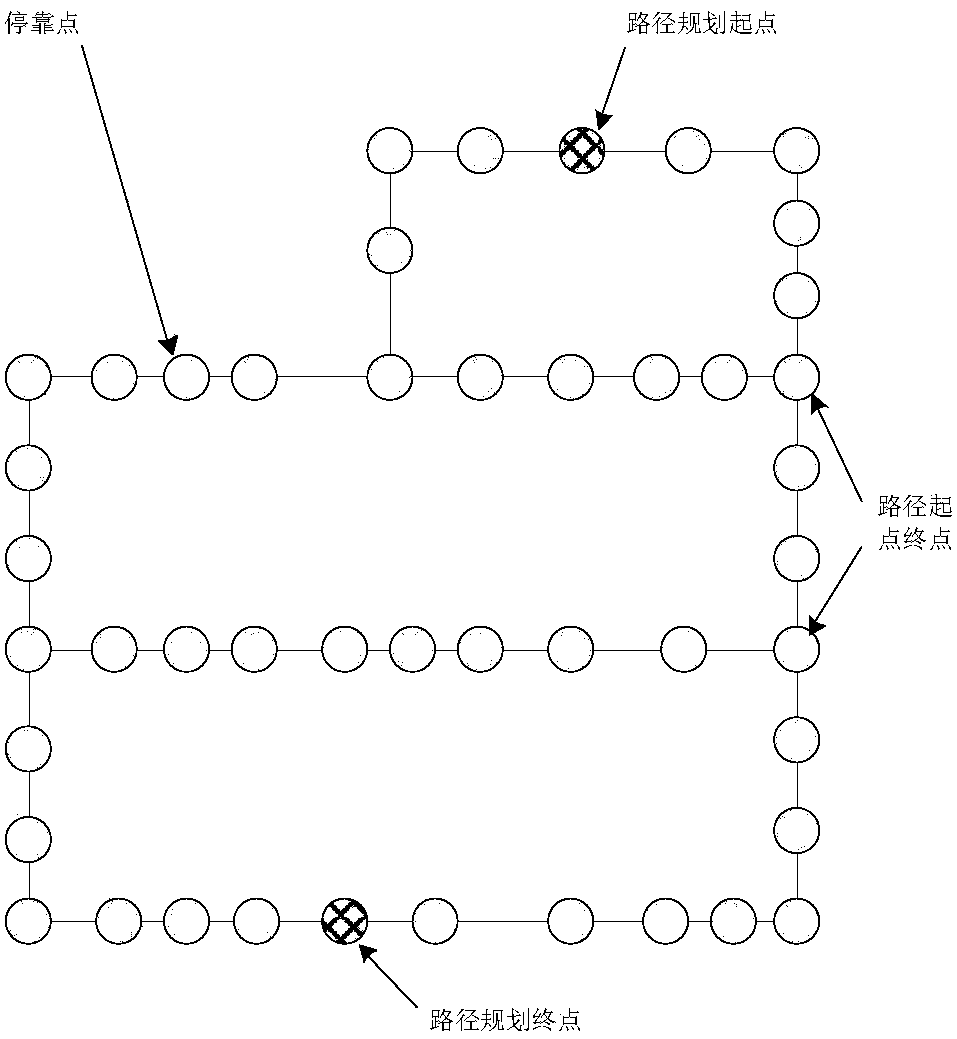
[0048] Step 1: Establish topology points. Abstract the stop points and path intersection points on the robot's running route into topological points of the directed graph data structure, such as figure 2 shown;
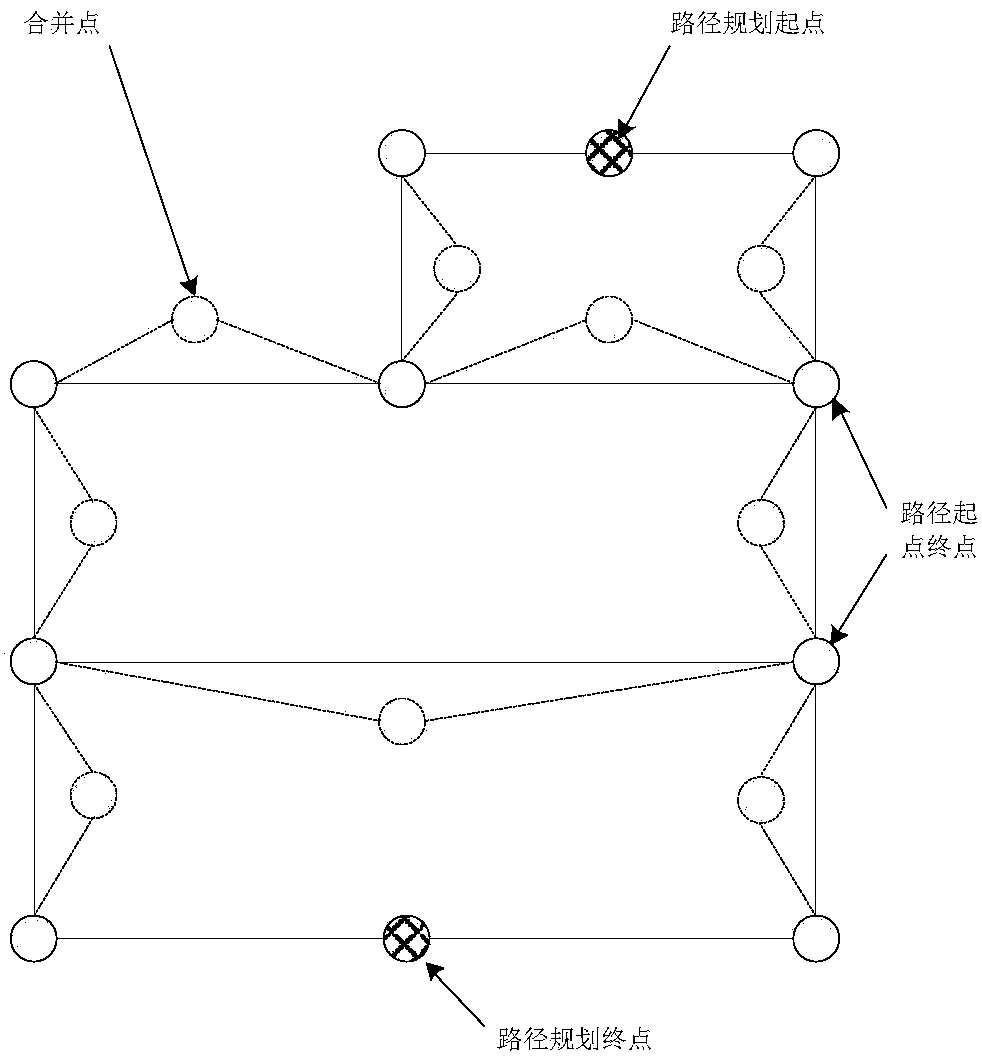
[0049] Step 2: Topological points are classified by path, including the following sub-steps:
[0050] (1) Divide the inspection route into a set of inspection paths, and each inspection path is only connected to other paths through the starting point and the end point;
[0051] (2) Classify the topological points of all stops according to the path they belong to, and obtain the set of topological points contained in each path, and merge all the topological p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More