

Control method of robot sound source positioning and awakening identification and control system of robot sound source positioning and awakening identification
A sound source localization and control method technology, applied in the field of robots, can solve the problems of inconvenience, inaccurate determination, and inability to automatically turn on the robot, and achieve the effect of prolonging the use time, saving power consumption, and improving the human-computer interaction experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to express the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings.
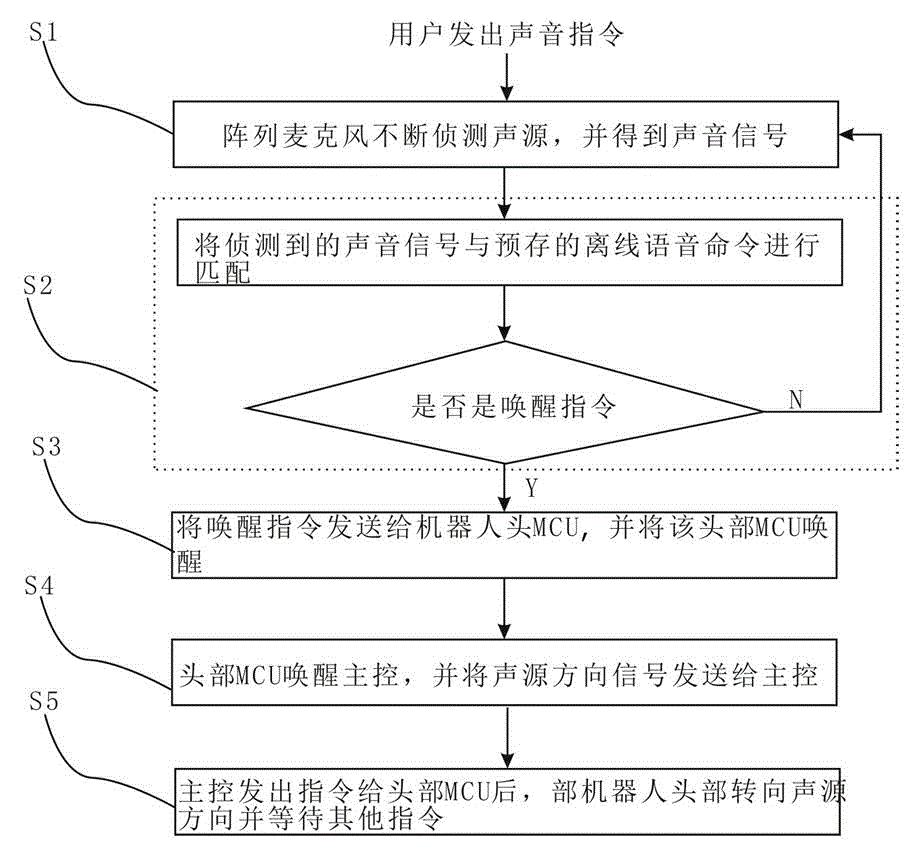
[0038] see figure 1 , the control method of the sound source localization of the robot of the present invention, wake-up identification, comprises the following steps:
[0039] In step S1, the array microphone continuously detects the sound source and obtains the sound signal; the array microphone includes a microphone for receiving the sound signal and a plurality of microphones for receiving the sound direction signal.
[0040] Step S2, matching the detected sound signal with the pre-stored offline voice command, and the matching is a wake-up command; the specific steps of this step are: matching the detected sound signal with the preset offline voice command, If the matching is successful, it is determined to be a wake-up instruction, and then proceed to step S3; if the matching is unsuccessful, then return to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More