

A stewart wearable wrist rehabilitation robot
A rehabilitation robot and wrist technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of poor practicability, poor flexibility of wrist joint rehabilitation equipment, single function, etc., and achieve compact structure and convenient operation. Portable, soft and good performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
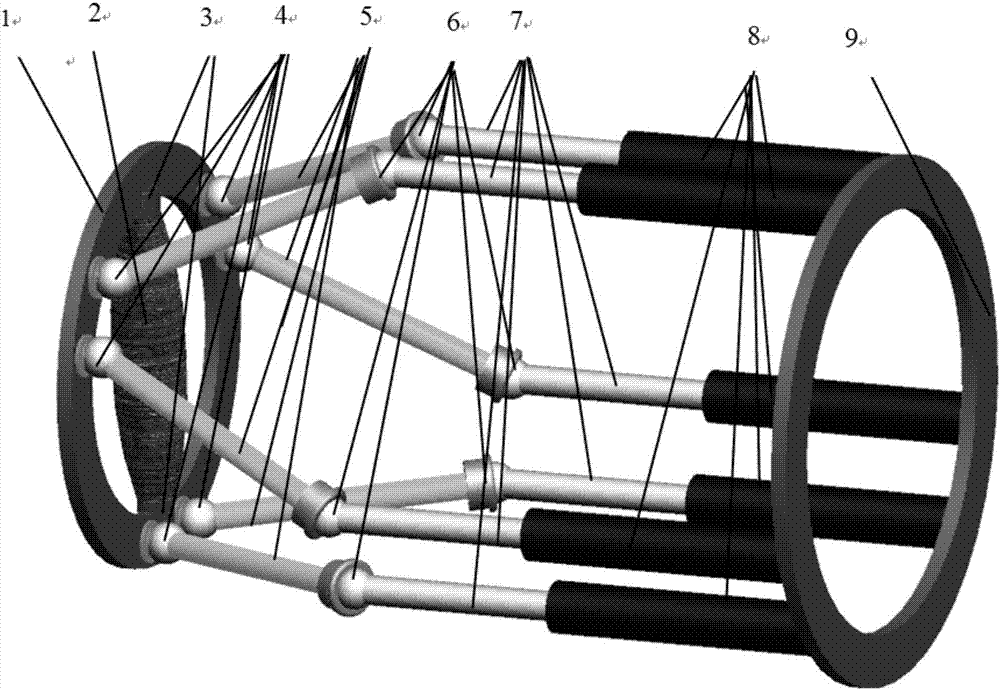
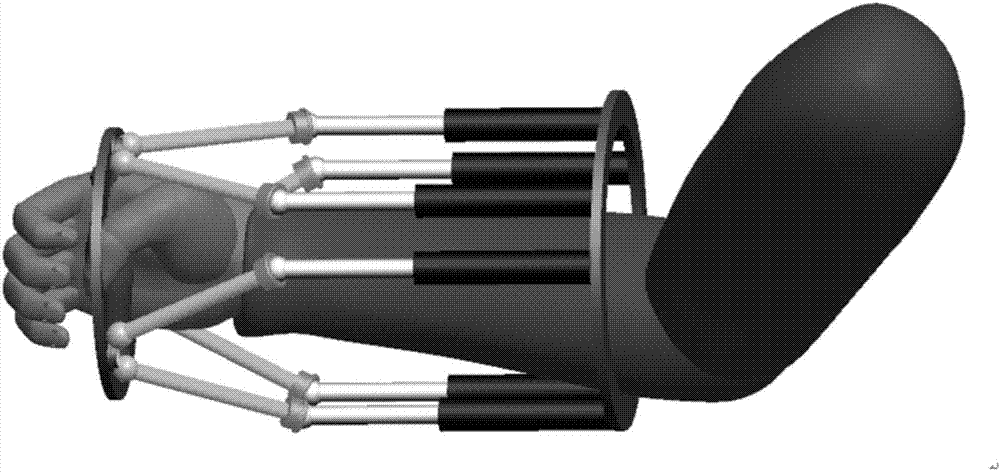
[0008] As shown in the drawings, the wrist rehabilitation robot of the present invention includes a front-end motion platform 1, a training handle 2, a six-dimensional force sensor 3, an upper ball joint 4, a connecting rod 5, a lower ball joint 6, a piston rod 7, and a cylinder 8 , rear-end fixed support platform 9 and other components. Both the front-end motion platform and the rear-end fixed support platform are ring-shaped, and the two ends of the training handle are connected to the front-end motion platform, and a six-dimensional force sensor is installed at the contact point between the two ends and the platform, which is used to detect the gap between the training handle and the front-end motion platform. The six connecting rods 5 are connected to the front-end motion platform through the upper ball joint, and are respectively connected to the six piston rods 7 through the lower ball joint. Each piston rod 7 is socketed in a cylinder 8, and each cylinder Fixed on the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More