

Six-freedom-degree parallel mechanism achieving complete decoupling of rotating and moving
A completely decoupling and rotating mechanism technology, applied in the field of robotics, can solve problems such as complex structures, and achieve the effects of simple and compact structure, easy assembly, and good rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
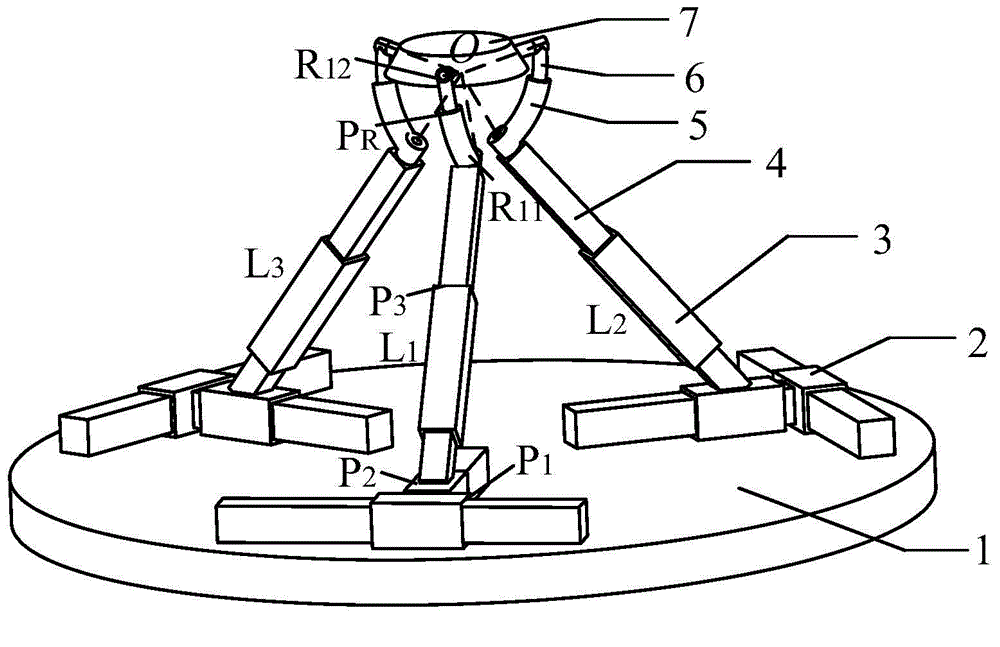
[0024] Such as figure 1 As shown, this embodiment includes: a movable platform 7, a base 1, and three motion branch chains L1 to L3, wherein one end of the motion branch chains L1 to L3 is movably connected with the base 1, and the other end is rotatably connected with the movable platform 7 , Making the movable platform 7 move in two dimensions or rotate around the fixed point O with three degrees of freedom on the sphere.
[0025] In this embodiment, the three kinematic branches are all movably connected to the base 1 in two dimensions, and the three kinematic branches L1 to L3 all include: a one-dimensional or two-dimensional movement mechanism and a rotation mechanism, wherein: the two ends of the rotation mechanism are respectively It is rotatably connected with the movable platform 7 and the one-dimensional or two-dimensional motion mechanism to form two rotating pairs R1 and R2. The other end of the one-dimensional or two-dimensional motion mechanism is movably connected wi...
Embodiment 2
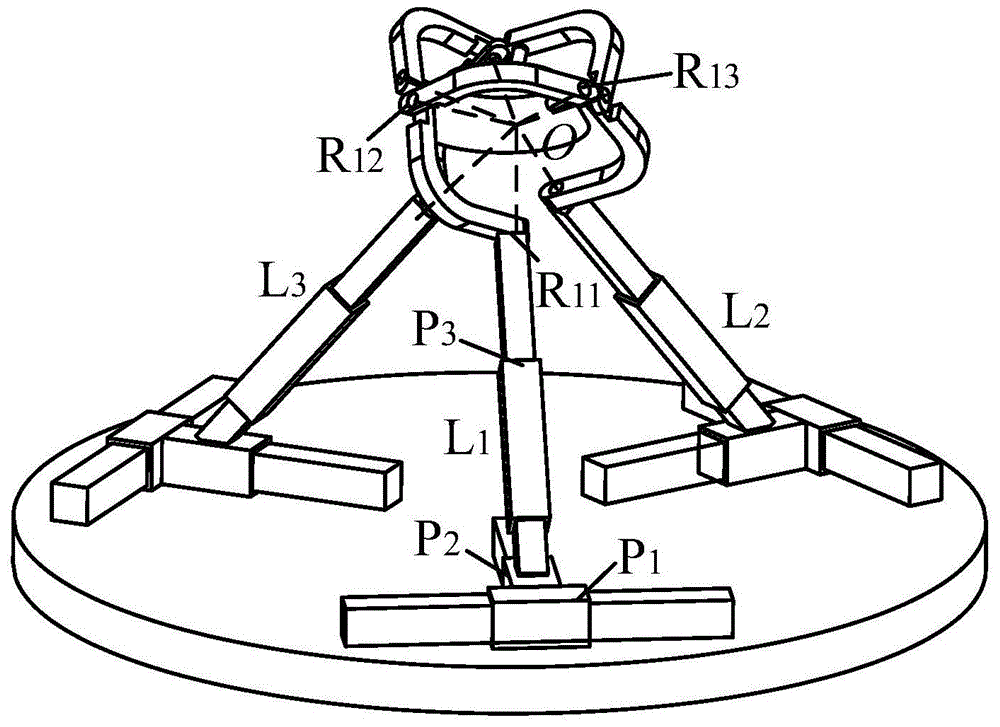
[0034] Such as figure 2 As shown, this embodiment is compared with embodiment 1, the rotating mechanism is realized by two arc-shaped rods 5 and 6 that are connected in rotation. The rotating connection itself constitutes a rotating pair R2, and the rotating mechanism is connected to the movable platform 7 in rotation. A rotating pair R3 is formed, and the rotating mechanism is rotatably connected with the linear moving pair P3 to form a rotating pair R1.
[0035] Compared with the first embodiment, the technical effect of this embodiment is greater in rigidity and easier to control.
Embodiment 3
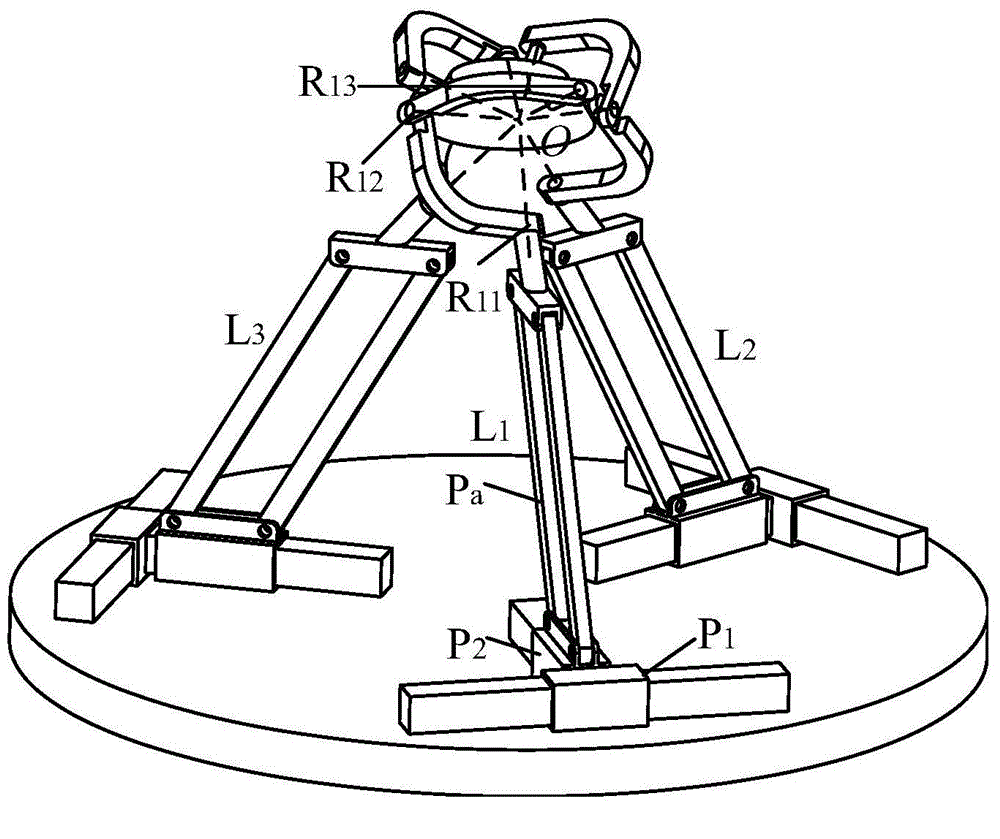
[0037] Such as image 3 As shown, in this embodiment, compared with the embodiment 2, the one-dimensional or two-dimensional motion mechanism in the motion branch chain is realized by the parallelogram motion pair Pa.
[0038] Compared with the second embodiment, the technical effect of this embodiment is that the parallelogram movement pair Pa is used to realize the movement of the P pair, which makes the structure more stable and rigid.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More