

Maglev Train-Bridge Self-excited Vibration Suppression Method Eliminating Bridge Displacement Feedback
A maglev train, displacement feedback technology, applied in electric vehicles, vehicle components, electric traction, etc., to reduce system costs, avoid self-excited vibration, and improve reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
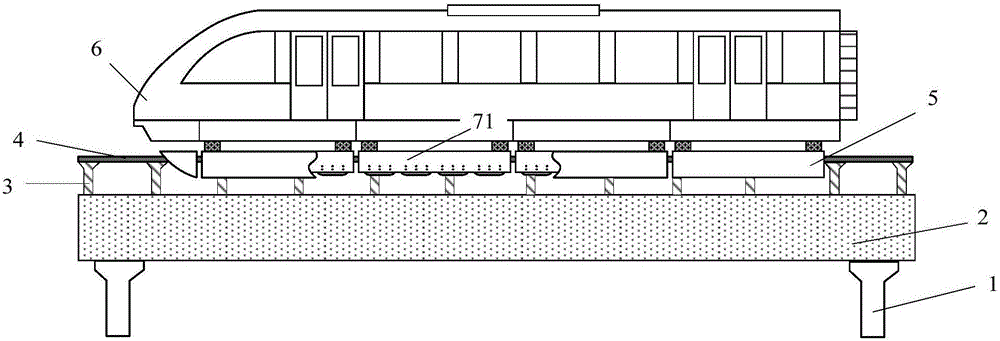
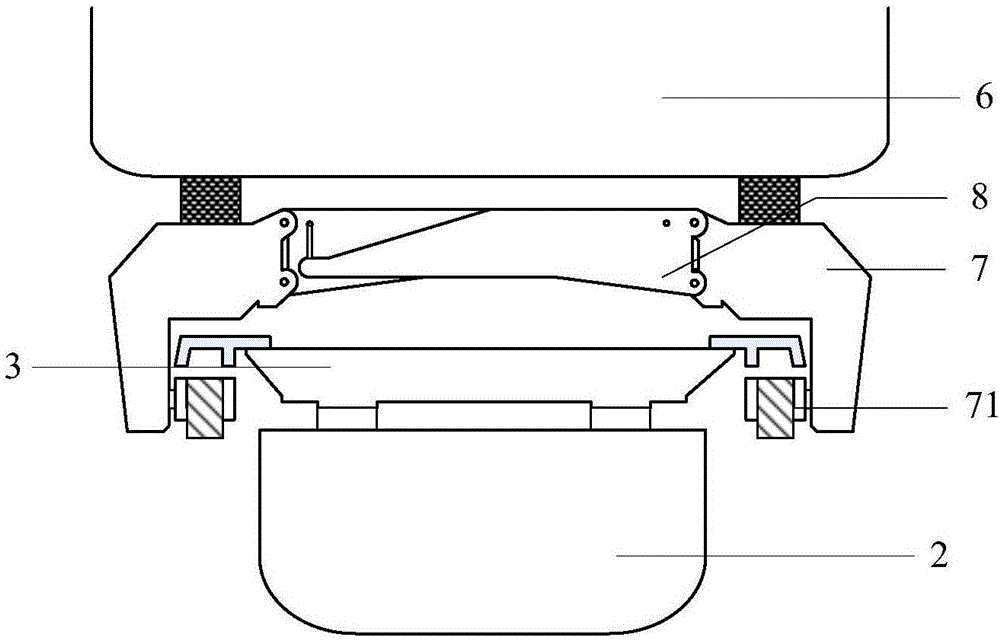
[0051] Such as Figure 6 As shown, the present invention eliminates the maglev train-bridge self-excited vibration suppression method of bridge displacement feedback, comprising the following steps:
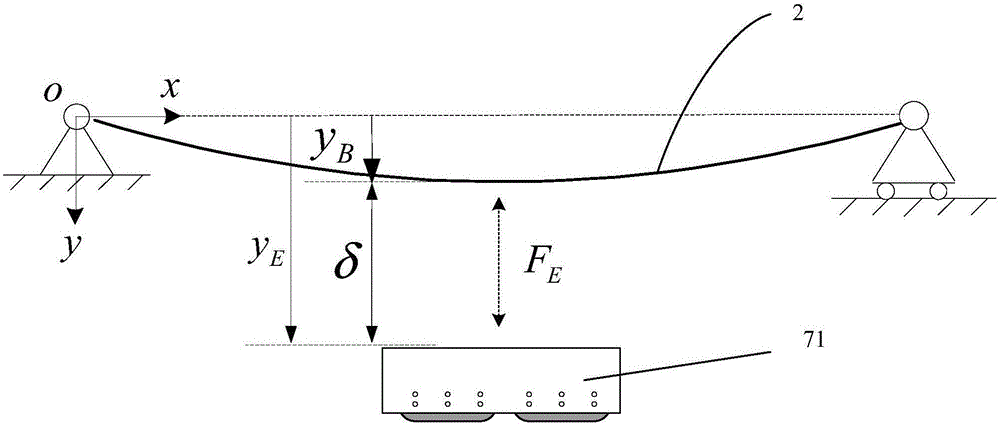
[0052] 1) Obtain the vibration displacement y of the electromagnet E (t);
[0053] 2) The levitation state of the maglev train is controlled by the levitation control law shown in formula (5),
[0054]
[0055] In formula (5), y E (t) is the vibration displacement of the electromagnet, is the vibration velocity of the electromagnet, is the vibration acceleration of the electromagnet, k p is the vibration displacement y of the electromagnet E (t) scale factor, k d is the vibration velocity of the electromagnet The damping coefficient of k a is the vibration acceleration of the electromagnet The feedback coefficient of , B(t) is the magnetic field strength in the levitation gap, B E (t) is the desired magnetic field density in the levitation gap, k B is the gain ...
Embodiment 2
[0068] In the present embodiment, step 2) is the same as embodiment 1, and the specific steps of step 1) are:
[0069] 1.1a) obtain the vibration acceleration a of the electromagnet by measuring the vibration acceleration sensor installed on the electromagnet E (t);
[0070] 1.2a) Calculate the vibration displacement of the electromagnet through the displacement estimator shown in formula (8)
[0071]
[0072] In formula (8), a and b are preset displacement estimator parameters, a E (s) is the vibration acceleration of the electromagnet, is the vibration displacement of the electromagnet.
[0073] In this embodiment, the displacement estimator is used to calculate the vibration displacement of the electromagnet instead of the ideal integral to calculate the vibration displacement y of the electromagnet E (s), which can effectively eliminate the adverse effects of integral saturation caused by ideal integrals. When using the displacement estimator to calculate the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More