

Optical axis nonlinear binocular range finding method
A binocular distance measurement and non-parallel technology, applied in the field of computer vision, can solve the problems affecting the distance measurement accuracy, the device deviates from the ideal installation position, etc., and achieve the effect of improving the distance measurement accuracy and reducing the distance measurement error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
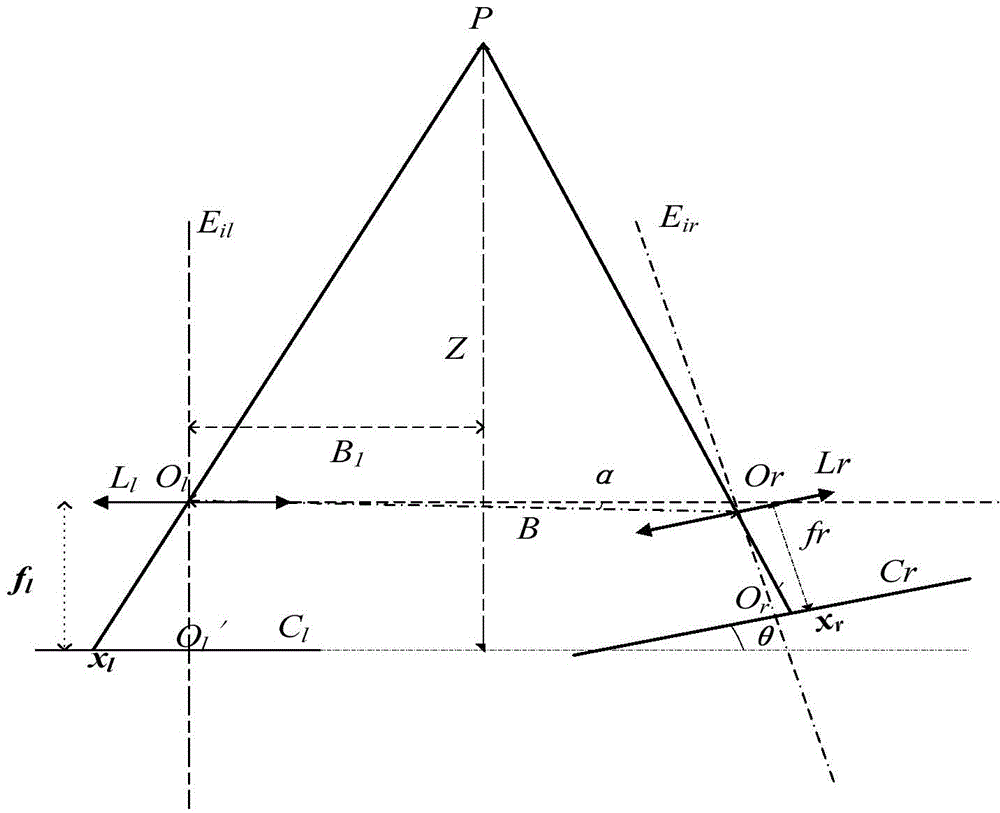
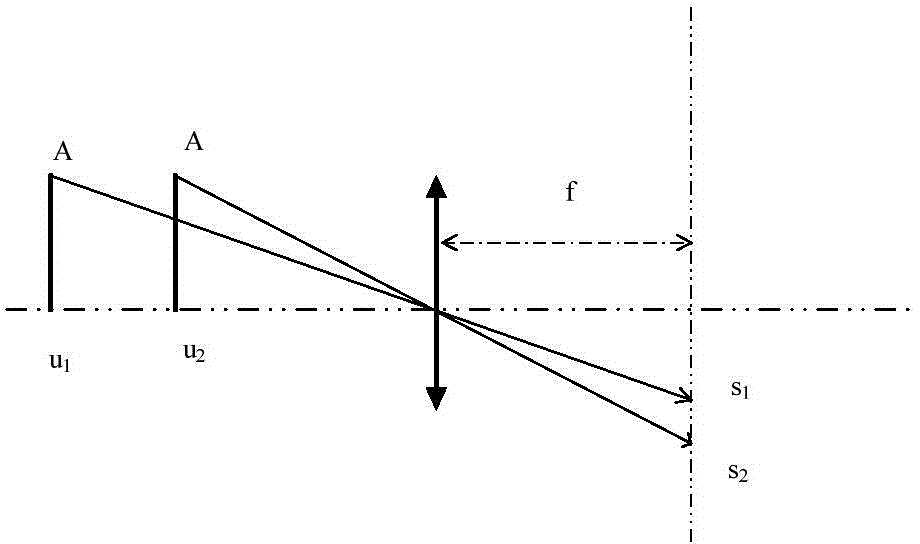
[0015] The present invention is a non-parallel binocular distance measuring method with optical axes, the basic principle of which is: first build a binocular distance measuring device, and establish a distance measuring formula used in conjunction with the binocular distance measuring device when the optical axes of the left and right cameras are not ideally parallel ; Then calibrate the parameters in the ranging formula to obtain a ranging formula whose unknown quantity only includes the imaging position of the scene object to be measured in the left and right camera images of the binocular ranging device; in practical applications, the directly read scene object to be measured The imaging position data in the left and right camera images are substituted into the calibrated ranging formula to calculate the distance between the scene target to be measured and the reference camera in the binocular ranging device.
[0016] 1. The binocular ranging device is:
[0017] like figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More