

Indoor positioning method based on range finding error correction
A technology for ranging error and indoor positioning, applied in the field of wireless positioning, can solve the problems of not achieving ideal results, high cost, complex technology, etc., and achieve the effects of reducing system burden, good error correction effect, and accurate positioning results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] 1. Select the position MT of the node to be tested 1 (50,30), at this time the distance between the node to be tested and each positioning node is d 0 =25.495,d 1 =25.495,d 2 =20.000;
[0082] 2. Through the arranged AP points, combined with TOA technology, the distance measurement value r is obtained by calculating the sending and receiving time of the signal 0 =33.273, r 1 =27.315, r 2 =22.442, the positioning result MT obtained by the centroid algorithm 1 '=(53.151, 32.898), the positioning error is e 1 '=4.281.
[0083]3. From the established error compensation model, the functional relationship between the ranging value and the compensation value is determined:
[0084] f(μ i )+μ i = r i , to get the initial compensation value of this correction process, the size of the initial compensation value is μ 0 =4.962,μ 1 = 3.969,μ 2 = 3.157.
[0085] 4. Pre-correct the ranging value through the initial compensation value, and the pre-correction result Sub...
Embodiment 2
[0089] 1. Select the position MT of the node to be tested 2 (45,32), at this time the distance between the node to be tested and the positioning node is d 0 =21.190,d 1 =30.806,d 2 =18.682;
[0090] 2. Through the arranged AP points, combined with TOA technology, the distance measurement value r is obtained by calculating the sending and receiving time of the signal 0 = 22.747, r 1 = 35.647, r 2 =21.387, the positioning result MT obtained by the centroid algorithm 2 '=(43.263, 33.164), the positioning error is e 2 '=2.092.
[0091] 3. From the established error compensation model, determine the functional relationship between the ranging value and the compensation value:
[0092] f(μ i )+μ i = r i , to get the initial compensation value of this correction process. The size of the initial compensation value is μ 0 =3.208,μ 1 =5.358,μ 2 =2.981.
[0093] 4. Use the initial compensation value to pre-correct the ranging value, and the pre-correction result After p...
Embodiment 3
[0098] 1. Select the position MT of the node to be tested 3 (26.5,25.5), at this time the distance between the node to be tested and the positioning node is d 0 = 1.581, d 1 =48.503, d 2 = 33.949;
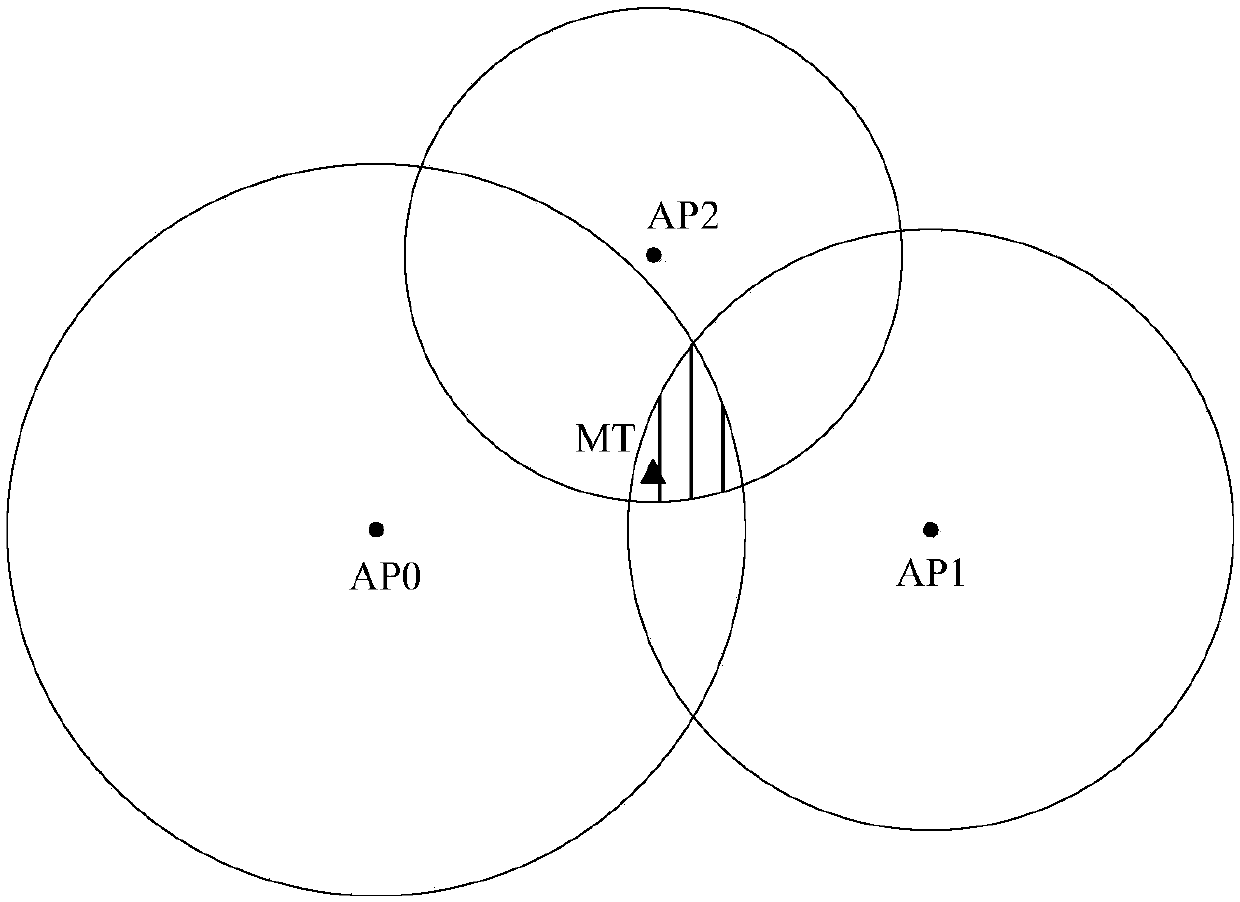
[0099] 2. Through the arranged AP points, combined with TOA technology, the distance measurement value r is obtained by calculating the sending and receiving time of the signal 0 = 1.695, r 1 =56.719, r 2 = 38.231, by r 1 -r 0 > l 01 , r 2 -r 0 > l 02 , easy to know by AP 0 The positioning circle with the center of the circle is respectively denoted by AP 1 The center of the positioning circle and the AP 2 Included by the positioning circle at the center of the circle, the three positioning circles do not intersect each other, so the position coordinates of the MT cannot be obtained.
[0100] 3. From the established error compensation model, determine the functional relationship between the ranging value and the compensation value:
[0101] f(μ i )+μ i = r i , to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More