

All wheel individual drive electric car traction control method and device
A technology of traction control and independent drive, which is applied in the field of electric vehicles, can solve problems such as locking, inability to accurately obtain slip rate vehicles, skidding, etc., and achieve the effect of preventing skidding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
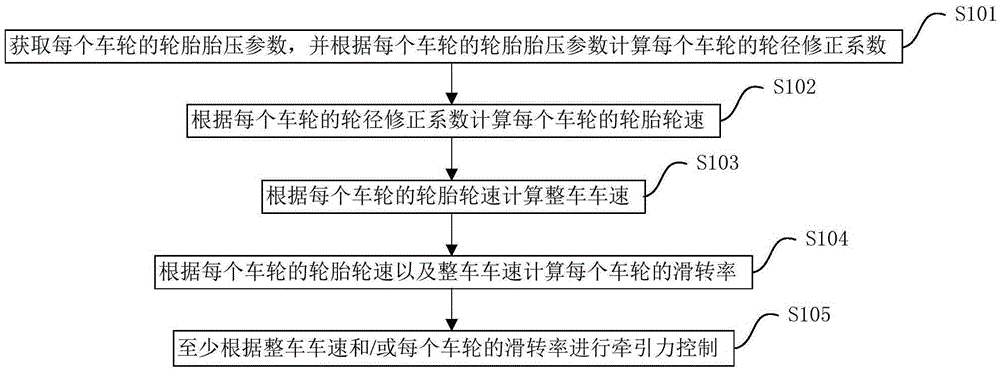
[0023] figure 1 It shows a flow chart of the traction control method for an all-wheel independent drive electric vehicle provided by an embodiment of the present invention, see figure 1 , the traction control method of an all-wheel independent drive electric vehicle provided in an embodiment of the present invention includes:
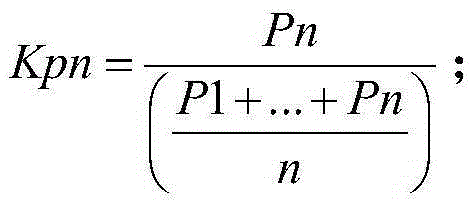
[0024] S101. Obtain tire pressure parameters of each wheel, and calculate a wheel diameter correction coefficient of each wheel according to the tire pressure parameters of each wheel.
[0025] Specifically, due to differences in the inflation of the wheels in practical applications, the wheel diameters of each wheel will be different, which will affect the calculation of the vehicle speed and slip rate. Therefore, the tire-based The pressure monitoring wheel speed compensation technology is used to accurately calculate the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More