A method and device for processing high-precision map data
A technology of map data and processing methods, applied in image data processing, special data processing applications, geographic information databases, etc., can solve problems such as map image object dislocation, ghosting, etc., to achieve the effect of removing ghosting and improving clarity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
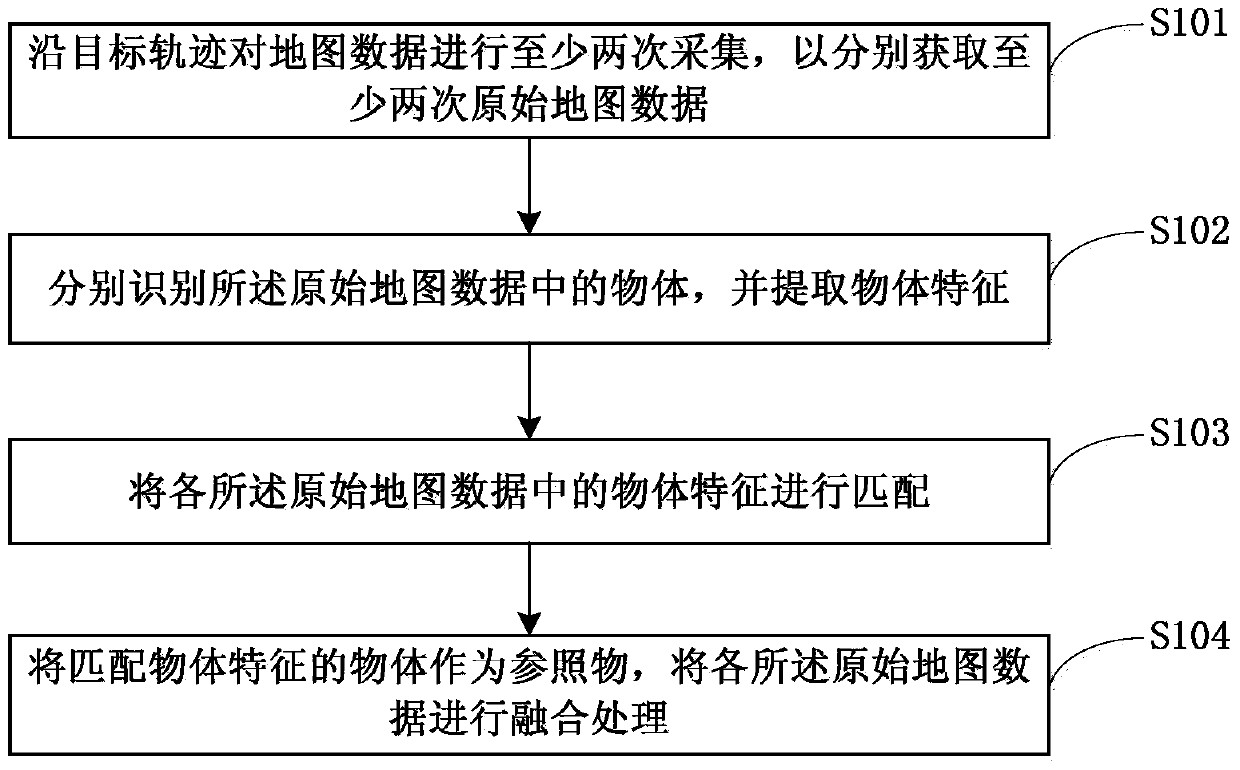
[0026] figure 1 This is a flowchart of a method for processing high-precision map data according to Embodiment 1 of the present invention. The method can be executed by a high-precision map data processing device, where the device can be implemented by software and / or hardware, and can generally be integrated in a server with image data processing capabilities.
[0027] See figure 1 , The method specifically includes the following:
[0028] S101. Collect map data at least twice along the target track to obtain at least two original map data respectively.
[0029] In the above operations, the target trajectory may refer to the collection route of a collection tool such as a collection vehicle, a collection airplane, or a collection robot that collects map data. The route can be preset and stored in the aforementioned collection tool. It can also be a better collection route that the collection tool determines by itself according to the collection start point and end point input by hu...
Embodiment 2
[0051] A method for processing high-precision map data provided by the second embodiment of the present invention is based on the above-mentioned embodiment. Further, the object in the original map data is identified separately, and the object features are extracted. The optimization is The point cloud data in the original map data performs static object recognition, and extracts structural features of the static object.
[0052] The point cloud data includes the reflectivity and topographic characteristics of different objects. Since the point cloud data is a series of discrete points of the surface model of the object data, compared with the use of image data to identify objects, the use of point cloud data to identify static objects can improve the accuracy of identifying objects, thereby improving the extracted The accuracy of the feature of the object.
[0053] Optionally, based on the technical solutions of the foregoing embodiments, the reflectivity in the point cloud data ...
Embodiment 3
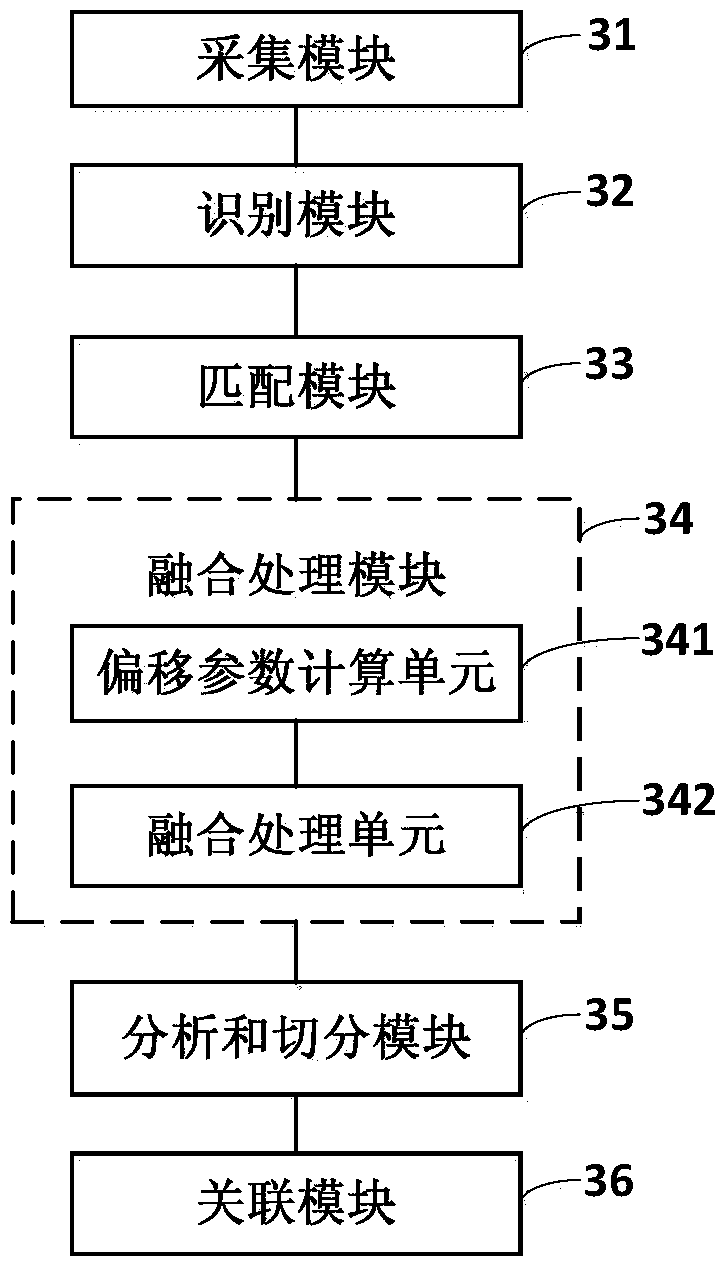
[0065] image 3 This is a schematic structural diagram of a processing device for high-precision map data provided in the third embodiment of the present invention.
[0066] See image 3 , The device of this embodiment specifically includes: an acquisition module 31, an identification module 32, a matching module 33, and a fusion processing module 34;
[0067] Wherein, the collection module 31 is configured to collect map data at least twice along the target track to obtain at least two original map data respectively;
[0068] The recognition module 32 is configured to recognize objects in the original map data and extract object features;
[0069] The matching module 33 is configured to match the object features in each of the original map data;
[0070] The fusion processing module 34 is configured to use the object matching the feature of the object as a reference object, and perform fusion processing on each of the original map data.
[0071] In the technical solution of this embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More