

A bionic foot that improves the naturalness and stability of the gait of a biped robot
A bipedal robot, a natural technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of poor stability and unnatural walking gait of bipedal robots, achieve smooth motion, reduce adverse consequences, and improve stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
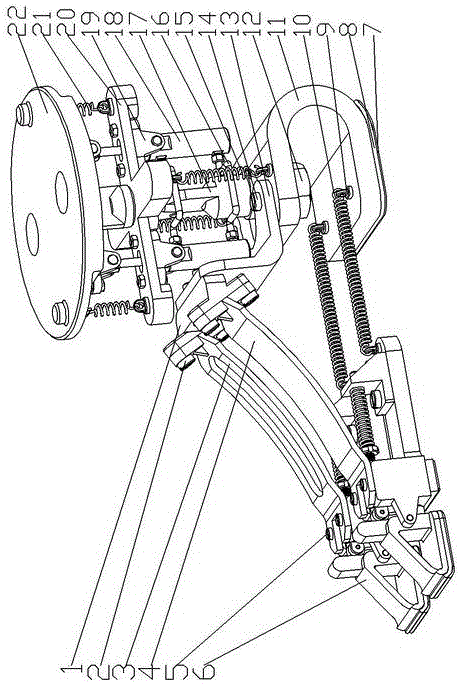
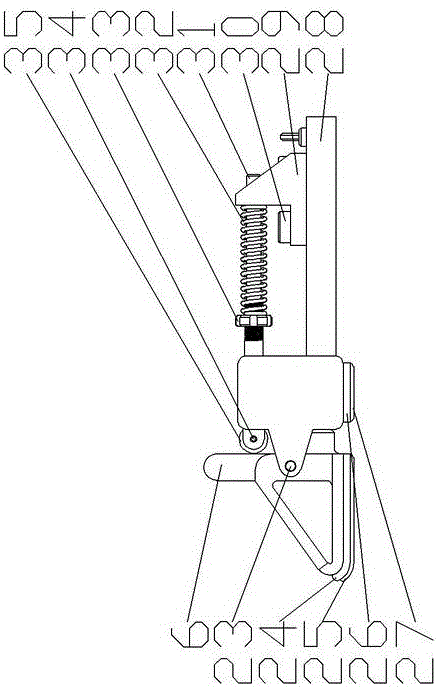
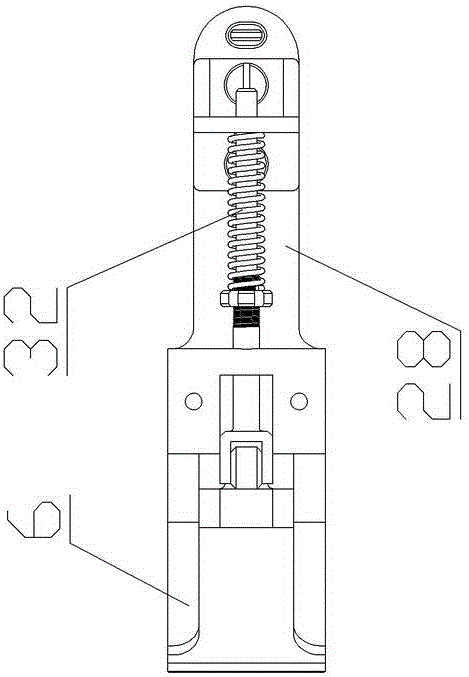
[0024] see figure 1 , figure 2 image 3 , Figure 4 , Figure 5 , Image 6 with Figure 7 As shown, this embodiment includes a bionic foot body and a bionic ankle;
[0025] The bionic foot body includes an outer bionic arch 3, an inner bionic arch 4, a toe member 6 and a heel member 11, and the second bionic arch connector 13 is connected to the heel member through two symmetrically distributed third screws 14. 11 is fixedly connected; the first bionic foot arch connector 1 is fixedly connected with the second bionic foot arch connector 13 through two symmetrically distributed fifth screws 40; the outer bionic foot arch 3 and the inner bionic foot arch 4 are respectively passed through the first screws 2 is fixedly connected with the first bionic arch connector 1; the outer arch support 28 and the inner arch support 37 are respectively connected with the outer bionic arch 3 and the inner bionic arch 4 through the second screw 5; the toe member 6 They are respectively h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More