

A Human Behavior Prediction Method Based on Human Skeleton Motion Information
A human skeleton and motion information technology, applied in the fields of intelligent human-computer interaction and intelligent robots, can solve the problems of limited accuracy of key attitudes, large amount of calculation, and no distinction between static components and dynamic components of feature sequences, so as to facilitate accurate extraction and good Effects of universality and rationality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
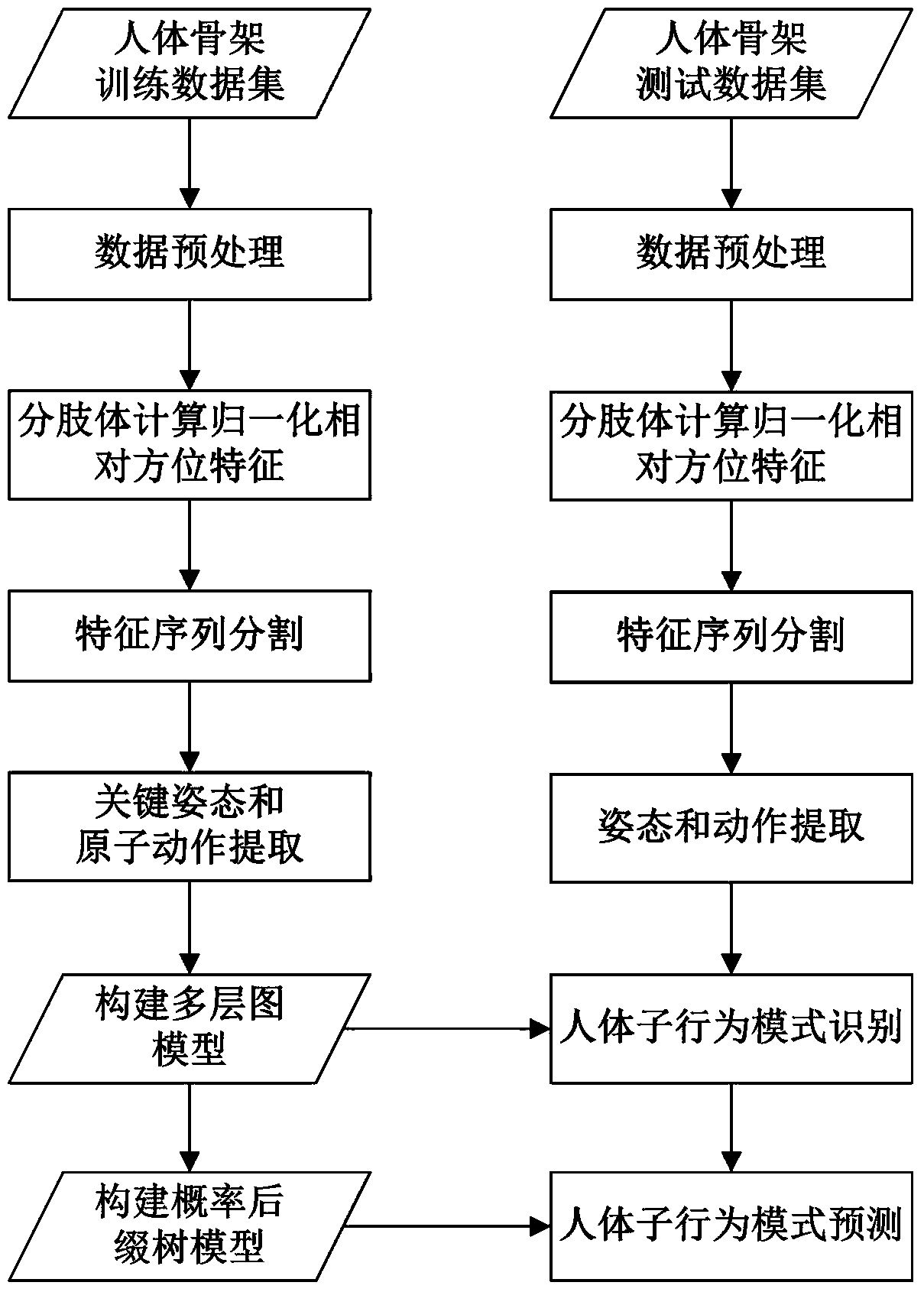
[0034] see Figure 1~5 , the human body behavior prediction method based on the human skeleton motion information proposed by the present invention, the algorithm flow is as follows figure 1 As shown, the specific steps are as follows:
[0035] a) Data preprocessing
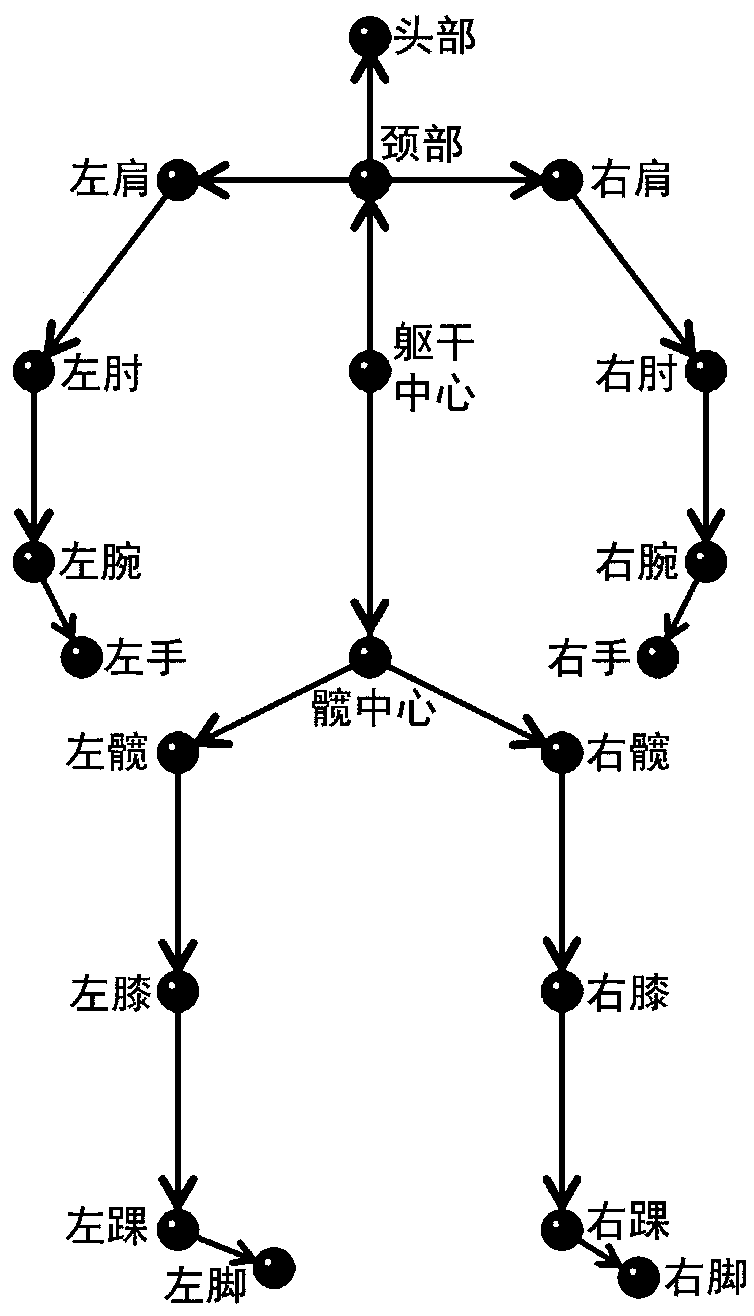
[0036] In general, extracted from RGB-D images such as figure 2The three-dimensional coordinates of the human skeleton shown in the world coordinate system can be directly used to calculate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More