

Human body behavior prediction method based on human body skeleton movement information
A technology of human skeleton and motion information, which is applied to instruments, character and pattern recognition, computer components, etc. It can solve the problems of large amount of calculation, limited accuracy of key attitudes, and no consideration of motion models, etc., so as to facilitate extraction, reduce noise and Effects of abnormal data, generalizability and rationality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
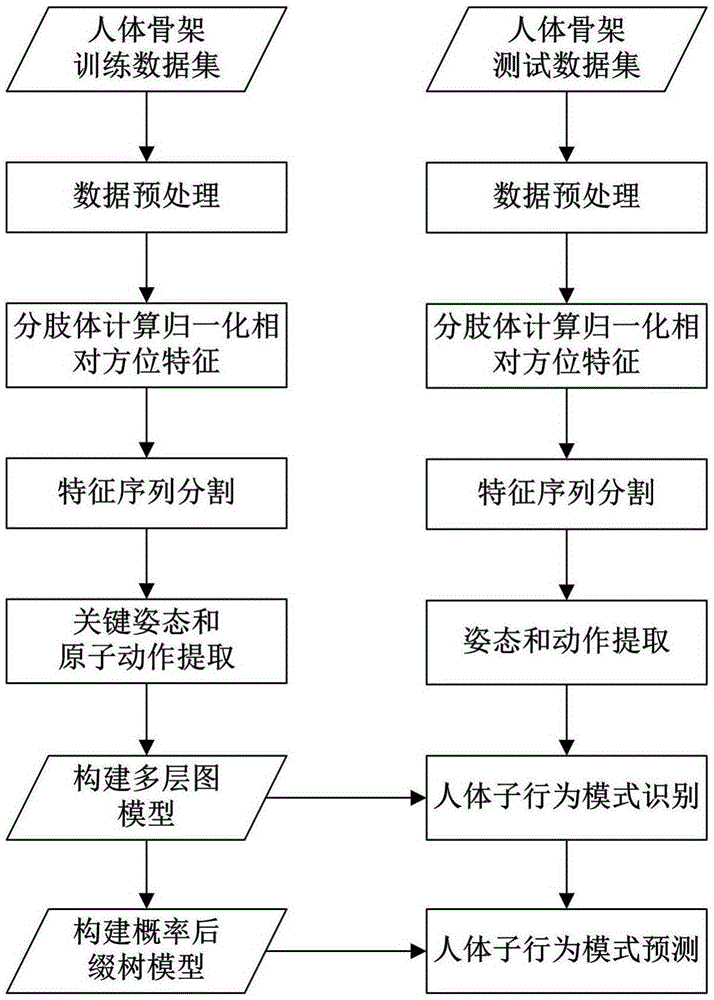
[0034] See Figure 1~5 , The human body behavior prediction method based on human skeleton motion information proposed by the present invention, the algorithm flow is as figure 1 As shown, follow the steps below:
[0035] a) Data preprocessing
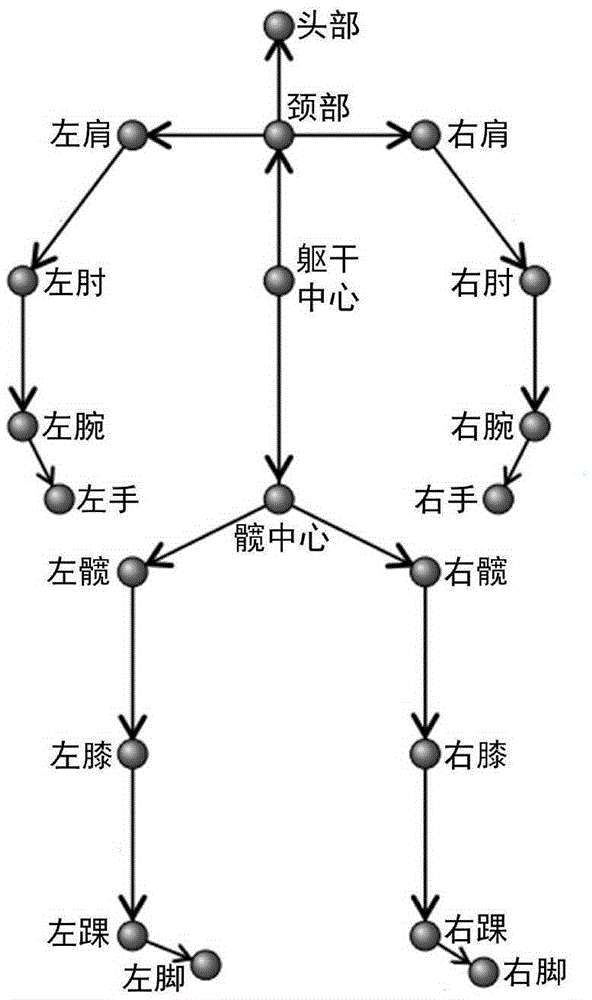
[0036] In general, what is extracted from the RGB-D image is as figure 2 The three-dimensional coordinates of the human skeleton shown in the world coordinate system can be directly used to calcula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More