

An exoskeleton shoulder girdle and upper limb collaborative rehabilitation robot
A rehabilitation robot and shoulder girdle technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve problems such as difficulty in maintaining rehabilitation movements, difficulty in ensuring rehabilitation effects, and high physical exertion, and achieve the effect of convenient rehabilitation training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
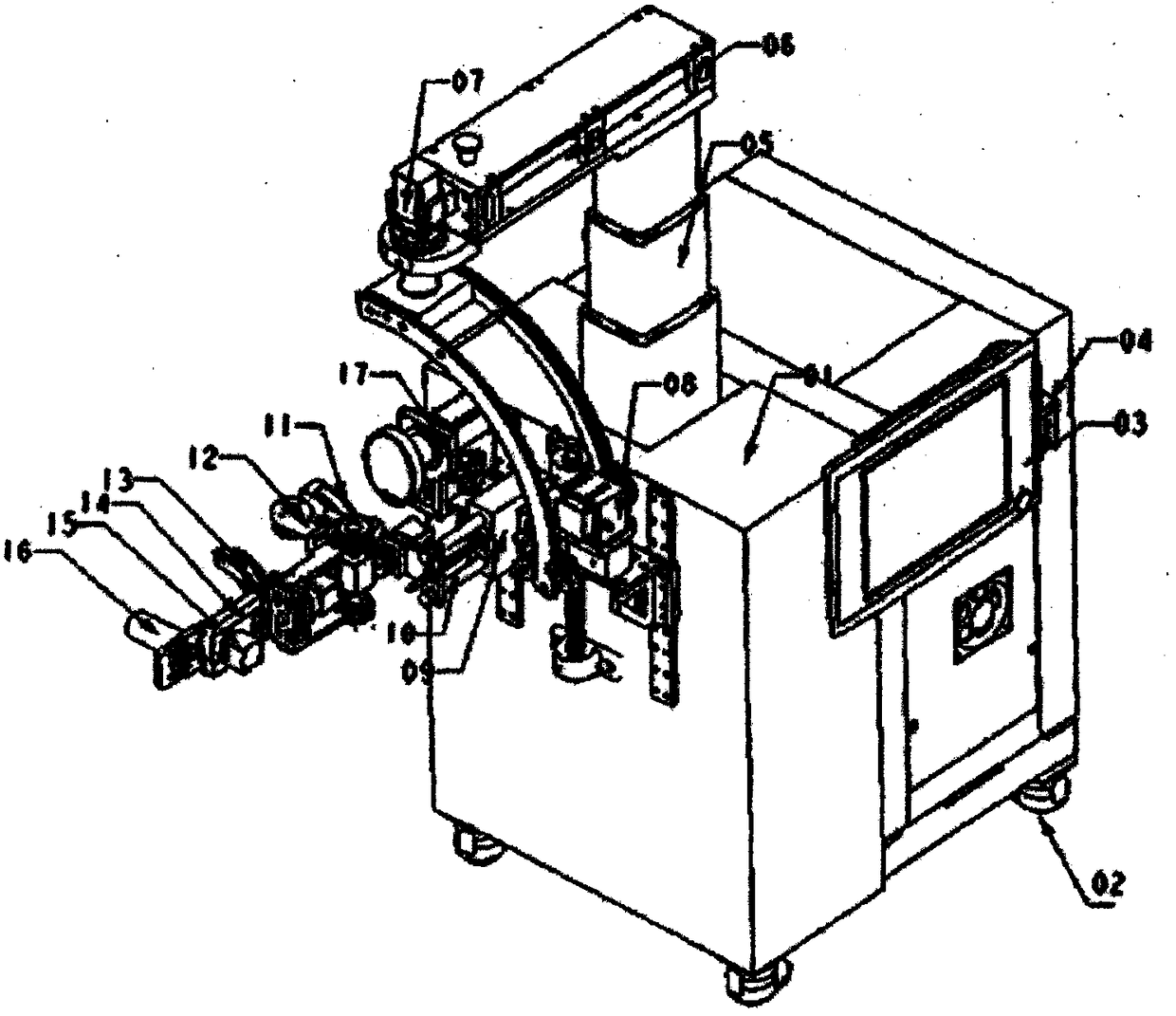
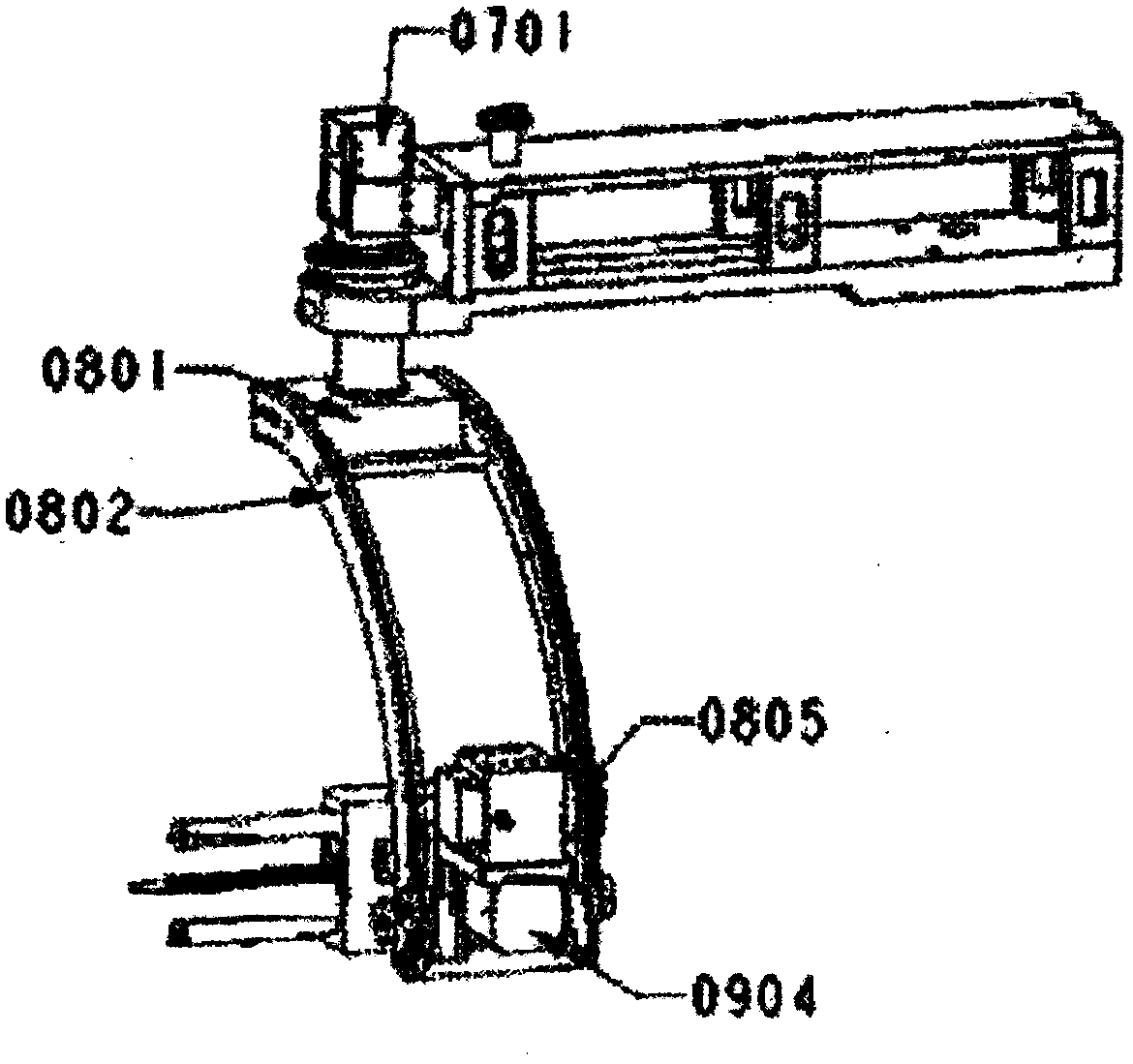
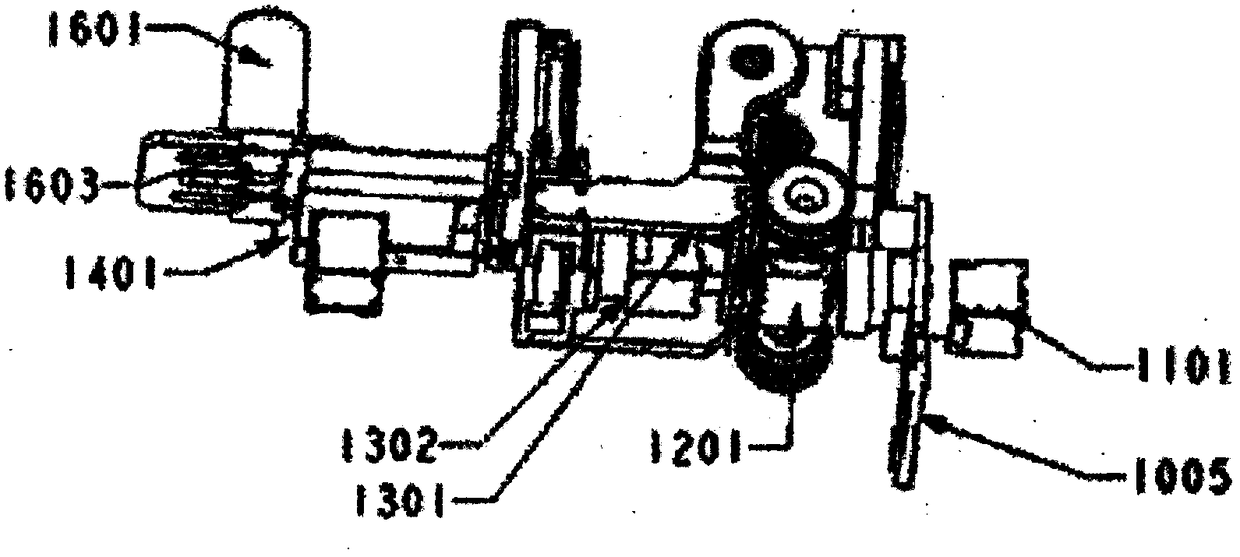
[0019] like figure 1 As shown, the exoskeleton-type shoulder belt and upper limb collaborative rehabilitation robot of the present invention includes wheels (02), electrical cabinet (01), display (03), display bracket (04), lifting column (05), outreaching beam (06), it is characterized in that: also comprise the internal and external rotation mechanism (07) of shoulder, the abduction and adduction mechanism (08) of shoulder, the forward bending and backward extension mechanism (09) of shoulder, the length adjustment mechanism of upper arm ( 10), upper arm internal and external rotation mechanism (11), elbow flexion and extension mechanism (12), forearm internal and external rotation mechanism (13), forearm length adjustment mechanism (14), wrist flexion and extension mechanism (15), hand The grasping mechanism (16) and the scapula-assisting mechanism (17) are provided.
[0020] Wherein, the bottom surface of the electrical cabinet (01) is equipped with four wheels (02), the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More