

Lightweight bionic-flexible-exoskeleton-type upper limb booster robot with multi degrees of freedom
A degree of freedom, exoskeleton technology, applied in gymnastics equipment, muscle training equipment, passive exercise equipment, etc., can solve problems such as increasing driving performance requirements, affecting the rehabilitation effect of wrist joints, and sports singular configuration and interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in further detail below in conjunction with the accompanying drawings.
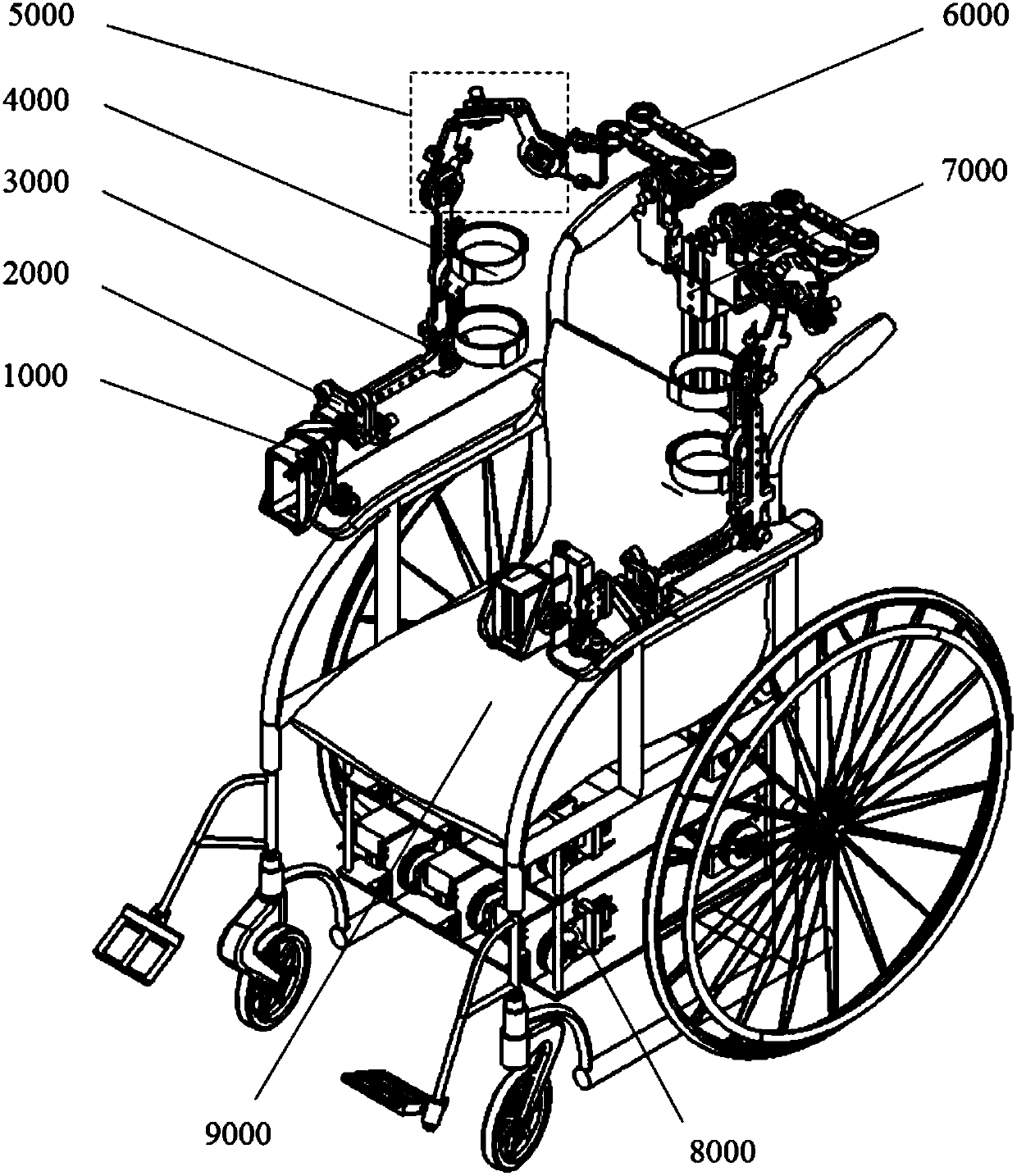
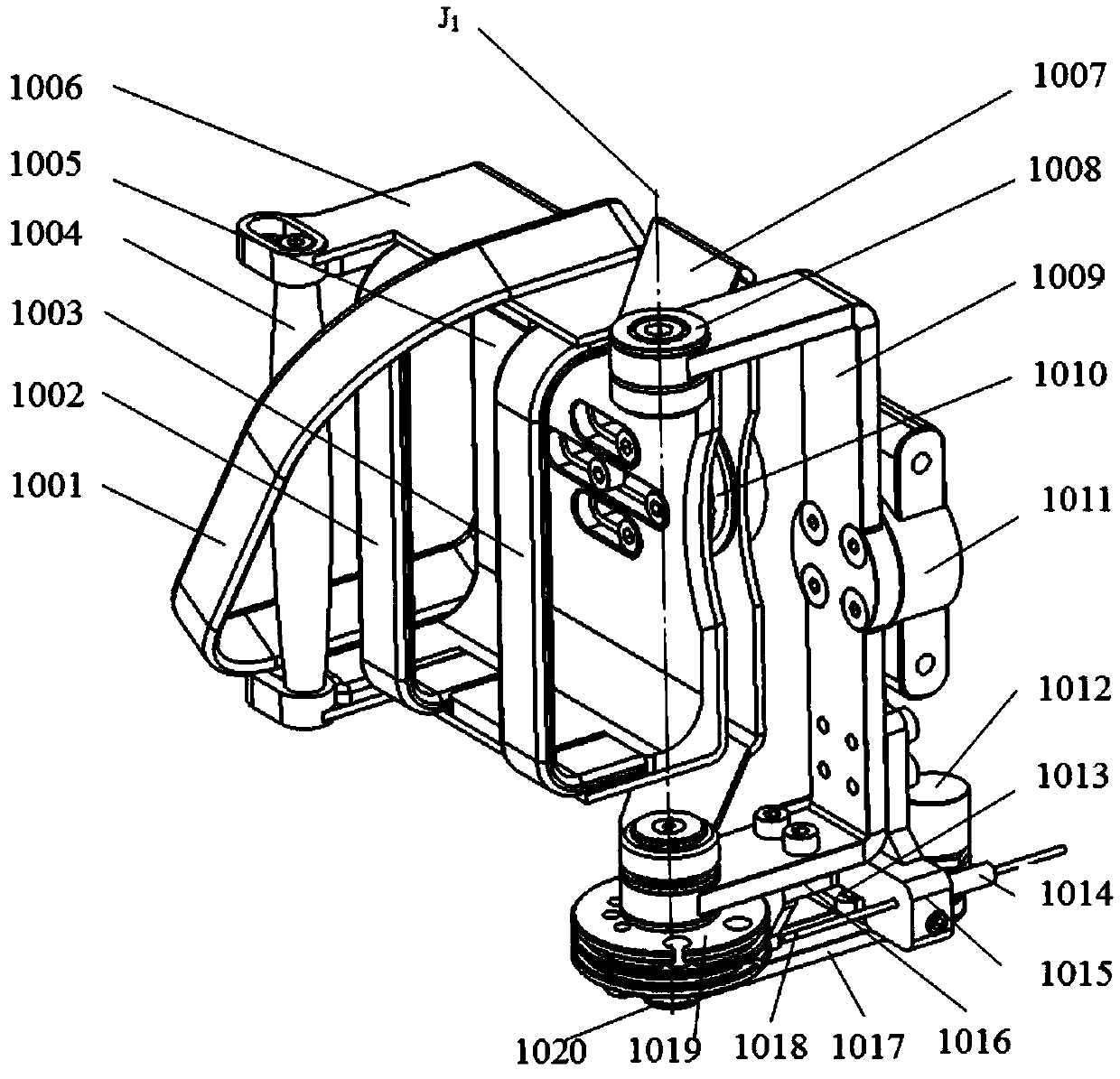
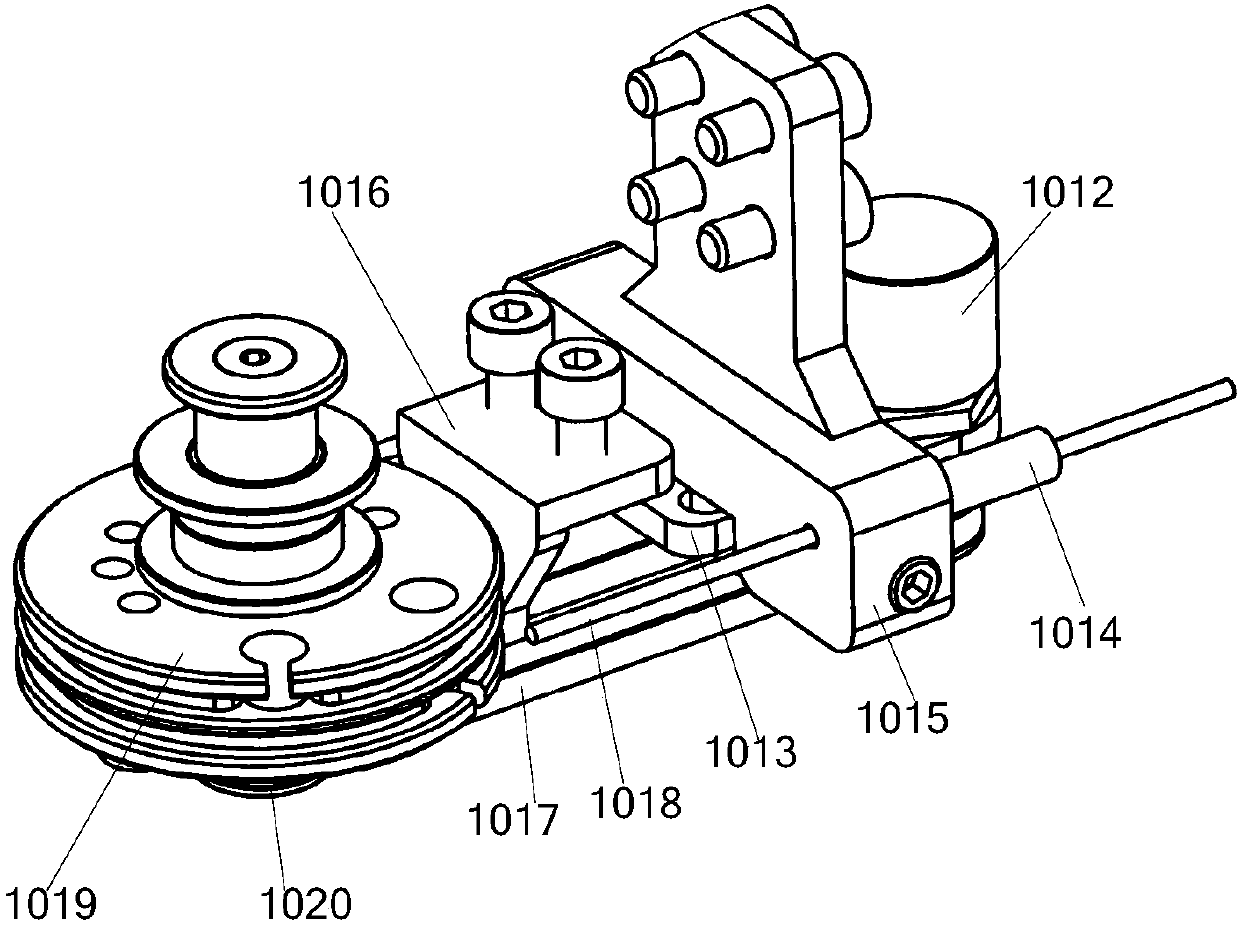
[0060] Such as figure 1 As shown, the present invention includes a wheelchair base 9000 for supporting an upper limb power-assisted robot. The two sides of the wheelchair base 9000 have the same structure, and each side includes sequentially connected wrist palm flexion / dorsiflexion motion components 1000, forearm internal rotation / external rotation motion assembly 2000, elbow flexion and extension motion assembly 3000, glenohumeral joint motion assembly 5000, and shoulder girdle motion assembly 6000, wherein wrist palm flexion / dorsiflexion motion assembly 1000, forearm internal / external rotation motion assembly 2000 and elbow The flexion and extension movement components 3000 respectively have lasso driving wheels that drive the respective movement components to rotate. The glenohumeral joint movement component 5000 includes the glenohumeral extension / retra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More