

Configuration-variable quadruped robot motion control method and system
A quadruped robot and robot movement technology, applied in the control/regulation system, non-electric variable control, attitude control, etc., can solve the problem of reduced environmental adaptability, slow movement speed, no redundant degrees of freedom and variable configuration motion control Combining these issues to achieve the effects of increasing adaptability and stability, increasing utilization efficiency, increasing stability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
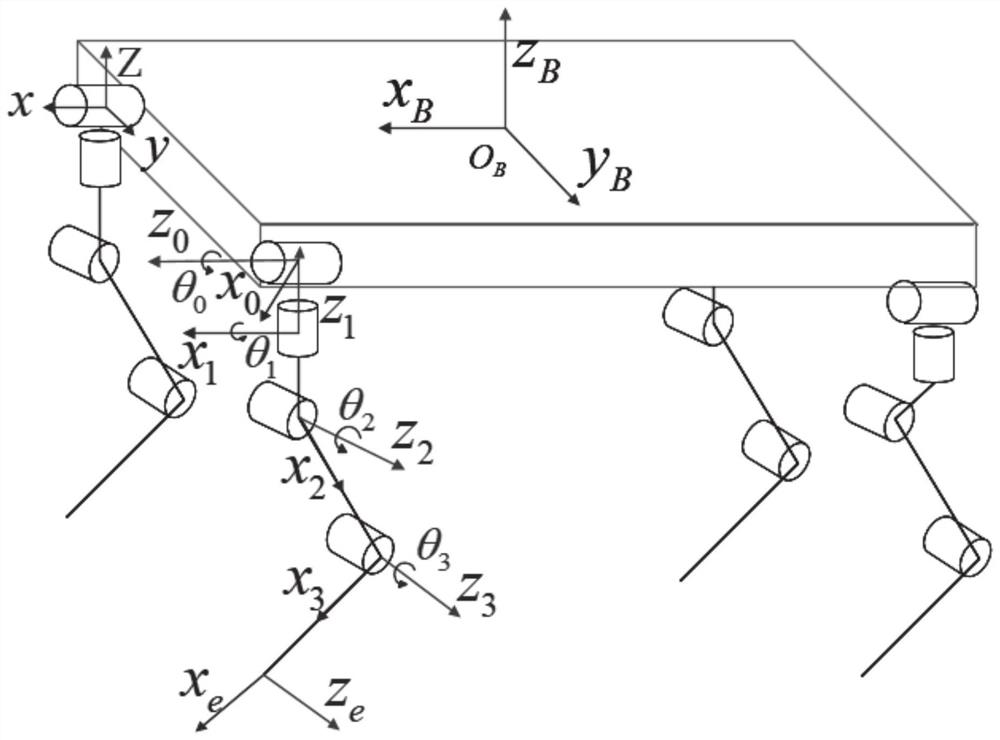
[0031] In a typical implementation of the present invention, this embodiment discloses a motion control method for a quadruped robot with a variable configuration of redundant degrees of freedom. It should be noted that, in this embodiment, the quadruped robot is a At present, more general robots, such as the electric-driven quadruped bionic robot disclosed in the patent No. ZL 2016100065414, have front legs on both sides of the front torso, and rear legs on both sides of the rear torso. figure 2 In this embodiment, it is simplified to a model with a torso and limbs.
[0032] The method mentioned in this embodiment, concrete steps are as follows:
[0033] (1) Planning the gait of the quadruped robot;
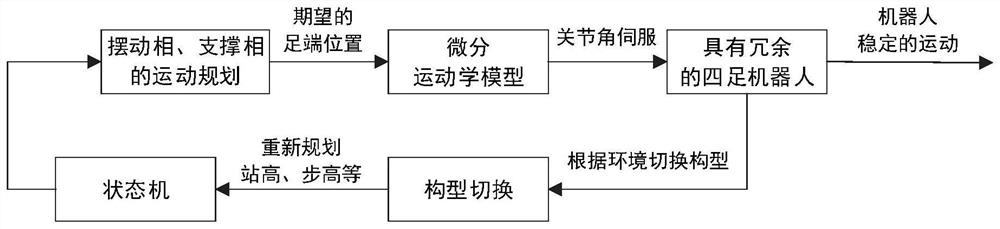
[0034] Taking the trot gait as the motion gait, each gait cycle includes two states of bipedal support and bipedal swing. On the premise of ensuring that the working space constraints of the feet are satisfied, the foothold point of the robot is adjusted to adjust the position...
Embodiment 2
[0072] In a typical implementation of the present invention, this embodiment discloses a quadruped robot motion control system with a variable configuration of redundant degrees of freedom, including the following modules, and cascading actions between modules:
[0073] The first module is configured to establish an integer programming model of a quadruped robot with the foot position and speed of the quadruped robot as input;
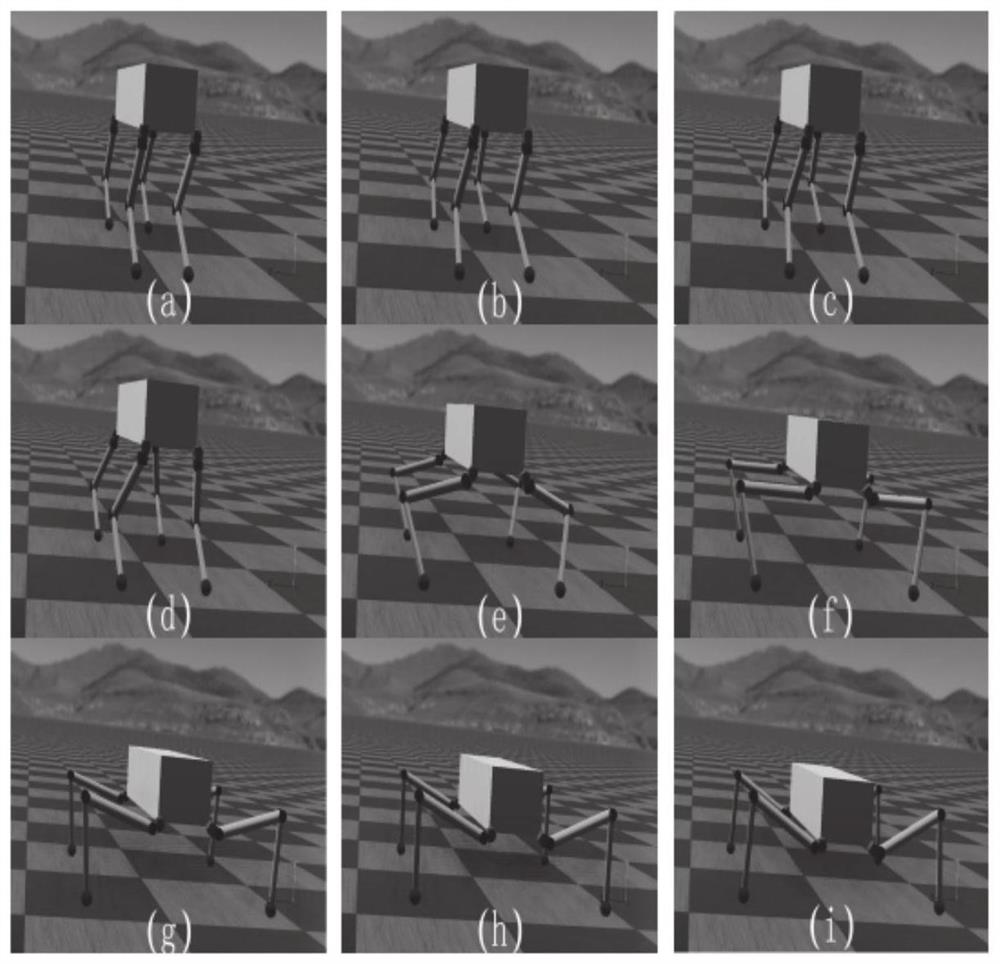
[0074] The second module is configured to switch between various configurations of the robot based on redundant degrees of freedom;
[0075] The third module is configured to plan and execute the motion of the robot according to the current configuration.
[0076] The cascading actions between the modules, the cascading action relationship is that when the nth module is completed, the n+1th module is put into action.
[0077] n is an integer greater than or equal to 1.
[0078] Certainly, the above-mentioned first module, second module, and third mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More