

Swing welding method for expanding dual rotating coordinating function axes based on six-freedom-degree robot
A robot and double-rotation technology, applied in the direction of manipulators, welding equipment, auxiliary welding equipment, etc., can solve the problems of inability to complete the 360° rotation of the 6-axis flange and the limitation of the range of motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
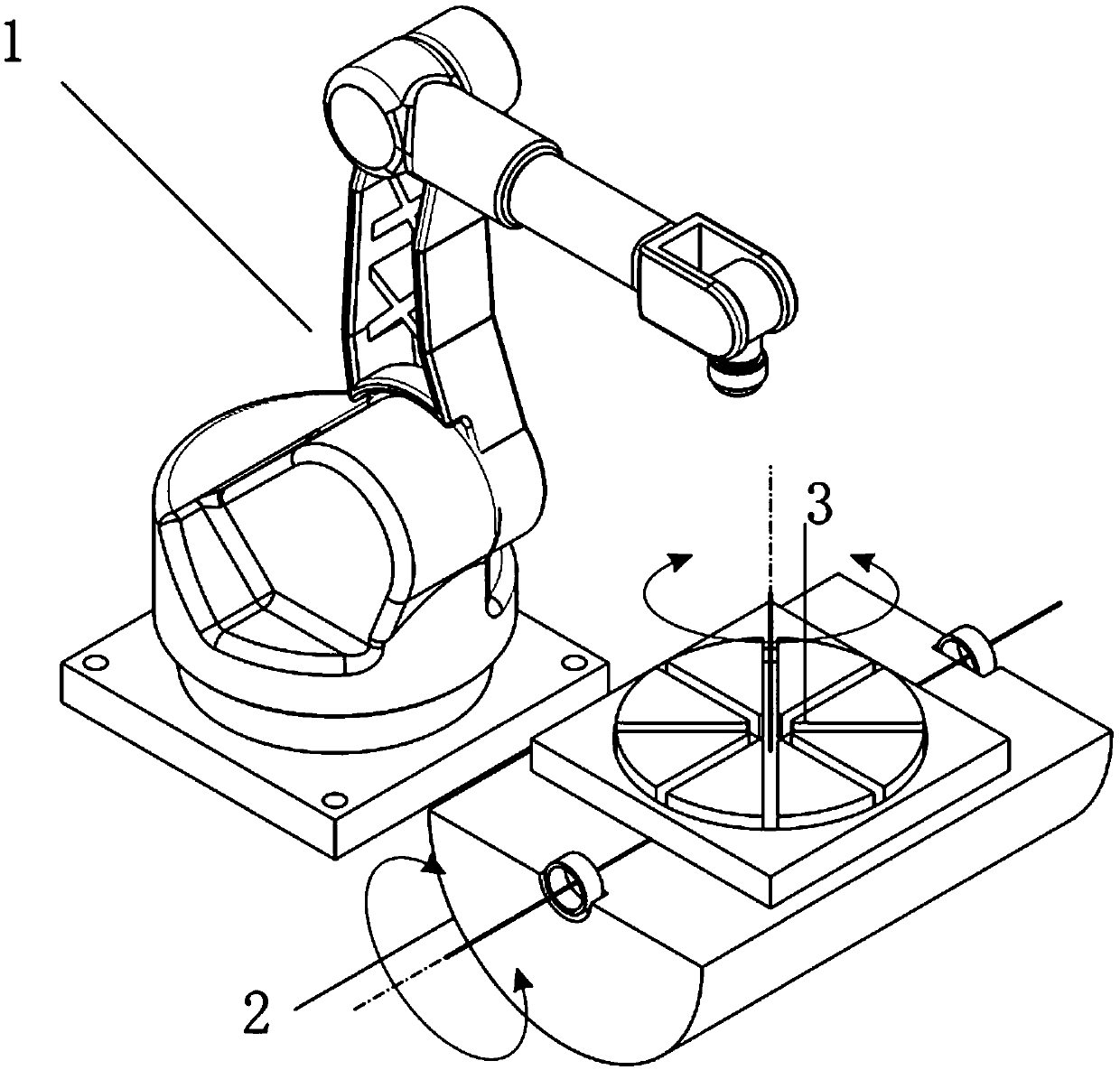
[0046] combined with figure 1 As shown, a weaving welding method based on a six-degree-of-freedom robot extending dual-rotation cooperative function axes, including a robot body 1, a rotating axis 3 for expanding the turning surface of the external station, and a turning axis for expanding the turning surface of the external station 2. The robot body 1 is the main carrier, mainly responsible for the function of reproducing the motion trajectory, and the rotary axis 3 is figure 1 The rotation station on the surface of the middle flip angle is mainly to expand the range of the flip surface of the external station, and the flip axis 2 is figure 1 The rotating station with medium rotation angle is mainly to expand the scope of the rotating surface of the external station. The rotary axis 3 and the turning axis 2 together form the extended range of the omnidirectional spherical working position of the external station. The rotating axis 3 and the turning axis 2 Together they form ...
Embodiment 2
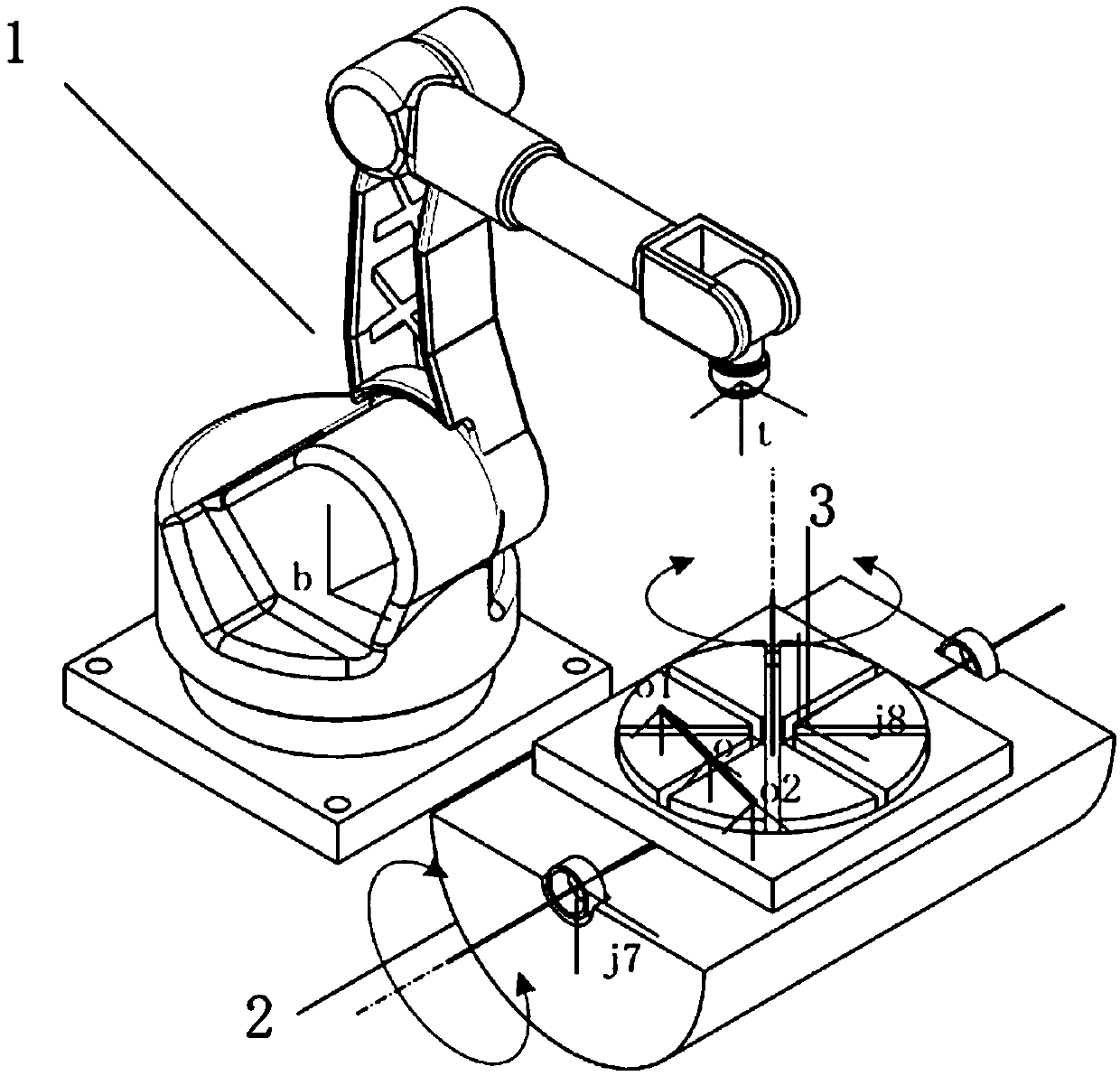
[0060] On the basis of Example 1, combined with figure 2 As shown, the step A1 specifically includes:
[0061] Step A11: Determine the double cooperative coordinate system, which includes: the robot base coordinate system b, the tool coordinate system t, the flip axis coordinate system j7, the rotary axis coordinate system j8 and the target coordinate system o. The pose of the front flip axis coordinate system j7 in the robot base coordinate system b The pose of the rotary axis coordinate system j8 in the robot base coordinate system b The pose of the rotary axis coordinate system j8 in the flip axis coordinate system j7 And the pose of the flip axis coordinate system j7 in the rotary axis coordinate system j8 The calculation formula is:
[0062]
[0063]
[0064] in, for the inverse matrix of for the inverse matrix;
[0065] Step A12: During teaching, move the tool to the target point to obtain the new coordinate system of the target point o ’ The new...
Embodiment 4
[0079] On the basis of embodiment 3, said step B specifically includes:
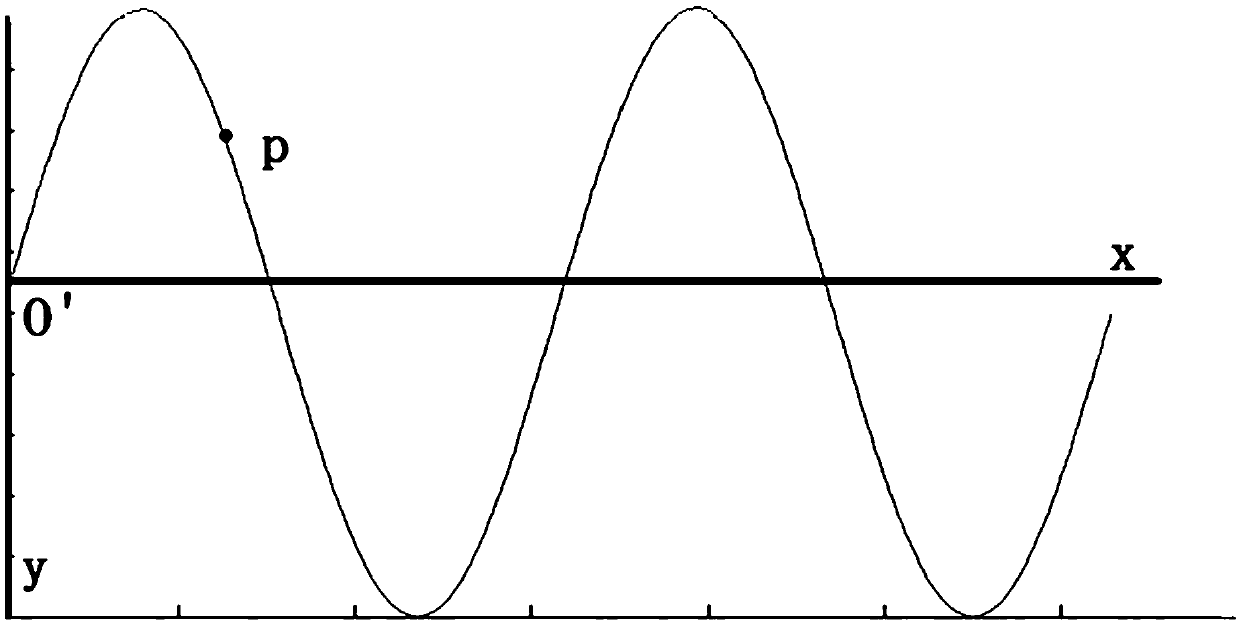
[0080] Step B1: According to step A31, the pose of the trajectory point coordinate system O in the j8-axis coordinate system can be obtained by interpolation. The x-axis of the swing arc coordinate system O' and the z-axis of the welding torch are cross-multiplied by the x-axis of the swing arc coordinate system O' to obtain the y-axis of the swing arc coordinate system O', and the z-axis of the swing arc coordinate system O' passes the right-hand rule OK, as in image 3 As shown, the trajectory of the swing arc is located in the xy plane of the track point coordinate system O. Taking the sin curve swing arc as an example, the cycle of the swing arc is X, and the amplitude of the swing arc is A. The expression y= A*sin(2*pi / X*x), given the x coordinates of point p, the value of y can be obtained, and the collaborative trajectory algorithm z is constant at 0, and point p is relative to the swing arc coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More