

Obstacle region division method based on minimum enclosing circle and maximum inscribed circle
A technology of obstacle area division and maximum inscribed circle, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as the inability to give a planable track area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] All features disclosed in this specification, or steps in all methods or processes disclosed, may be combined in any manner, except for mutually exclusive features and / or steps.
[0056] Granularized obstacle description framework
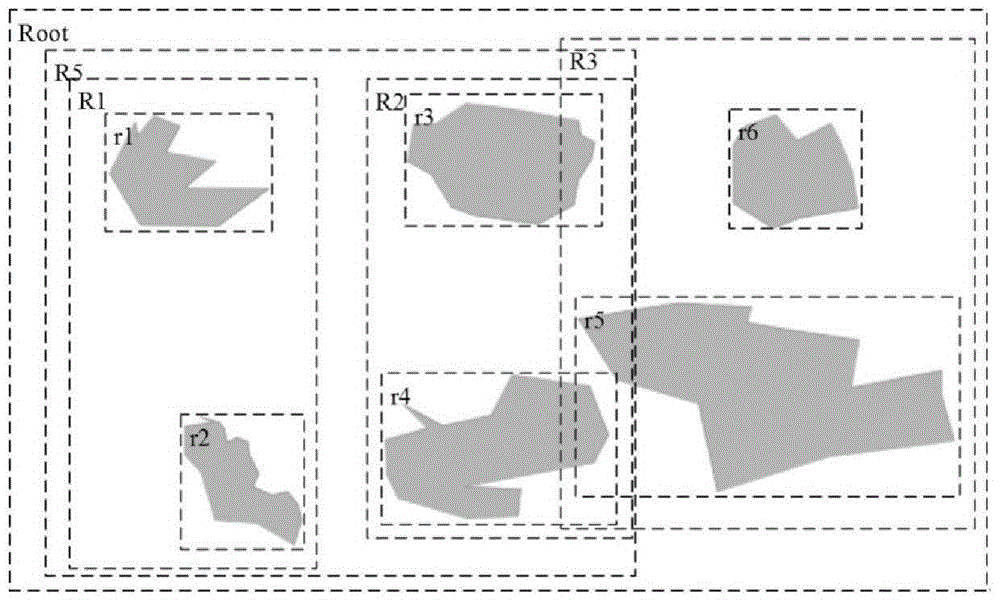
[0057] In the present invention, by analyzing the basic characteristics and existing characteristics of environmental barriers, we design a multi-grained structure of barriers such as Figure 4 shown. Divided according to different granularities, one obstacle can be divided into 1, 2, 3,..., N obstacle areas (sub-areas). The division of sub-regions needs to be determined according to the corresponding path planning algorithm, which is not included in the obstacle description method of this patent.
[0058] This multi-granularized obstacle description framework provides support for obstacle path planning at different granularities:
[0059] The aircraft quickly flies over obstacles or avoids high-threat obstacles. It only needs to know whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More