Self-walking-type mechanical arm
A manipulator and self-propelled technology, applied in the field of manipulators, can solve problems such as troublesome maintenance and intricate internal structures, and achieve the effects of convenient maintenance, good shock absorption performance, and low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
[0031] Unless expressly stated otherwise, throughout the specification and claims, the term "comprise" or variations thereof such as "includes" or "includes" and the like will be understood to include the stated elements or constituents, and not Other elements or other components are not excluded.
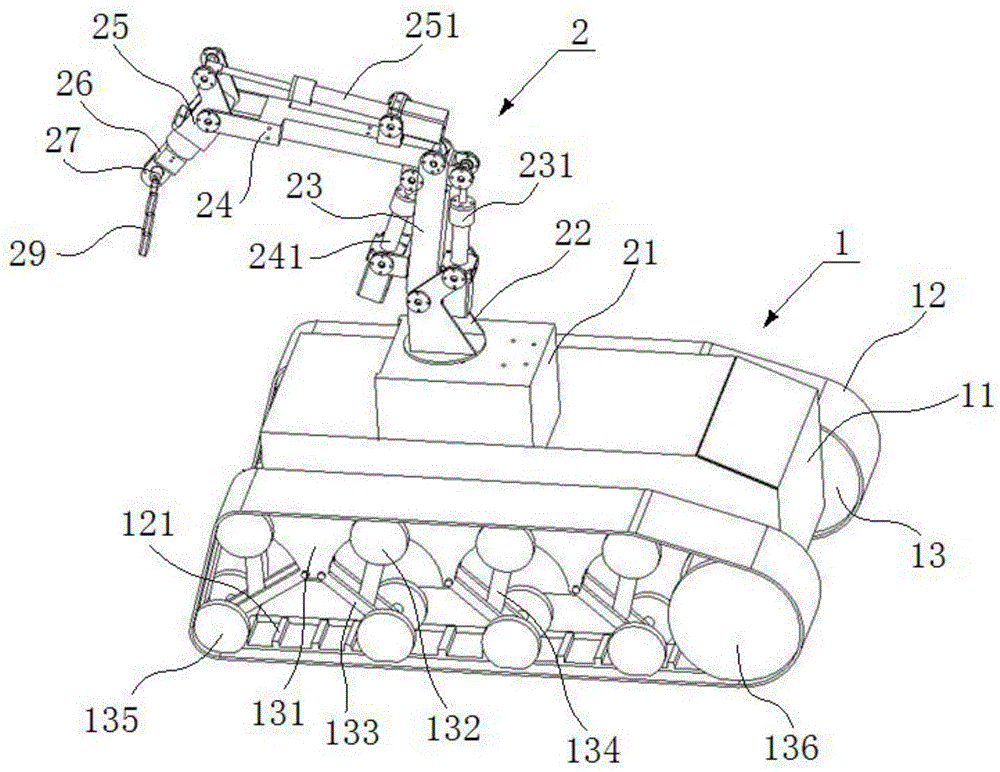
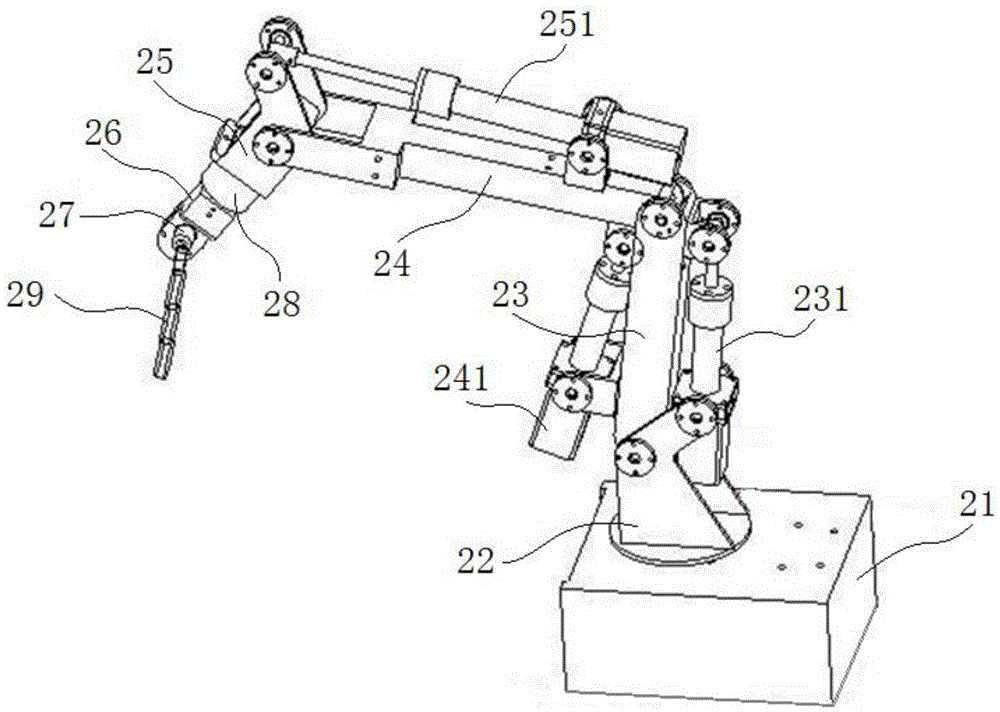
[0032] Figure 1 to Figure 3 A schematic structural view of a self-propelled manipulator according to a preferred embodiment of the present invention is shown, and the self-propelled manipulator includes a transport device 1 and a manipulator 2 .
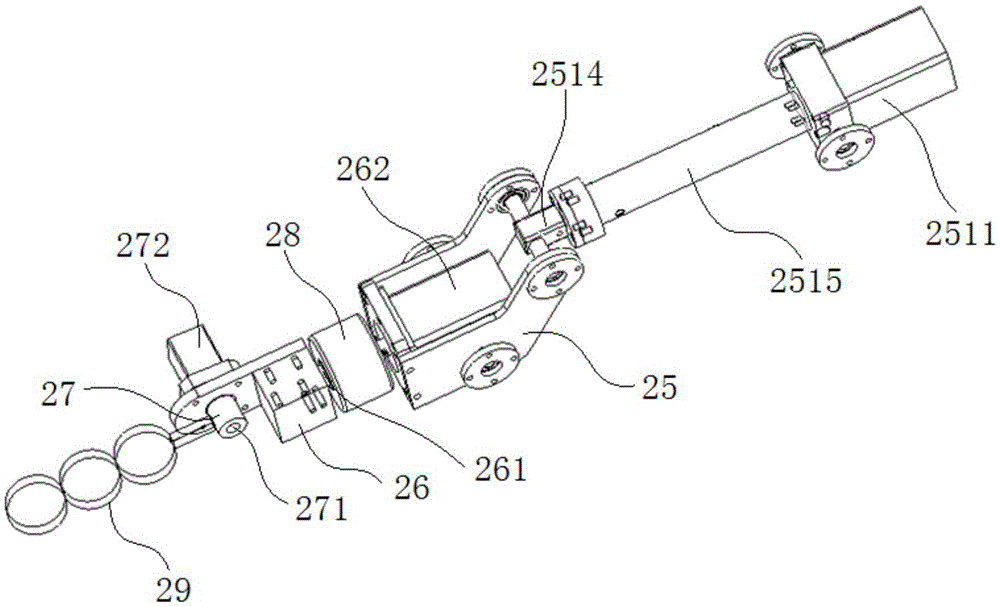
[0033] refer to figure 1 and figure 2 The manipulator 2 includes a base 21, a turntable 22, a rear arm 23, a middle arm 24, a forearm 25, a turntable 26, and a mount 27, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com