

Matching method and device for traffic signs
A technology of traffic signs and matching methods, which is applied in the field of matching methods and devices of traffic signs, can solve the problems of low matching efficiency and manual matching efficiency, and achieve the effect of improving matching efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
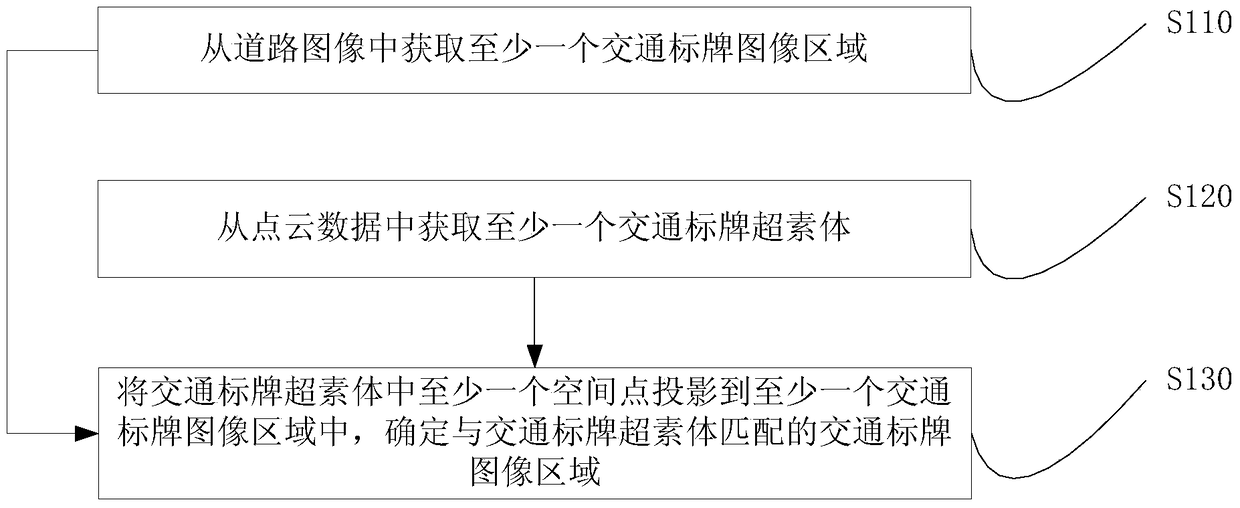
[0022] figure 1 It is a flow chart of the traffic sign matching method provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation where road point cloud data and road images are matched. This method can be used to perform road point cloud data and road images The matching terminal can be executed, and the terminal can be a server, a personal computer, a notebook computer, a tablet computer, a car center console, a smart phone or a smart wearable device, etc. The method includes:
[0023] S110. Acquire at least one traffic sign image area from the road image.
[0024] The road image can be obtained by taking pictures of the road with a photographing device. The road image can be a color image or a grayscale image.
[0025] By performing image recognition on road images, the image area of traffic signs is found from road images. When identifying, it can be searched according to the shape and color characteristics of the traffic sign. ...
Embodiment 2
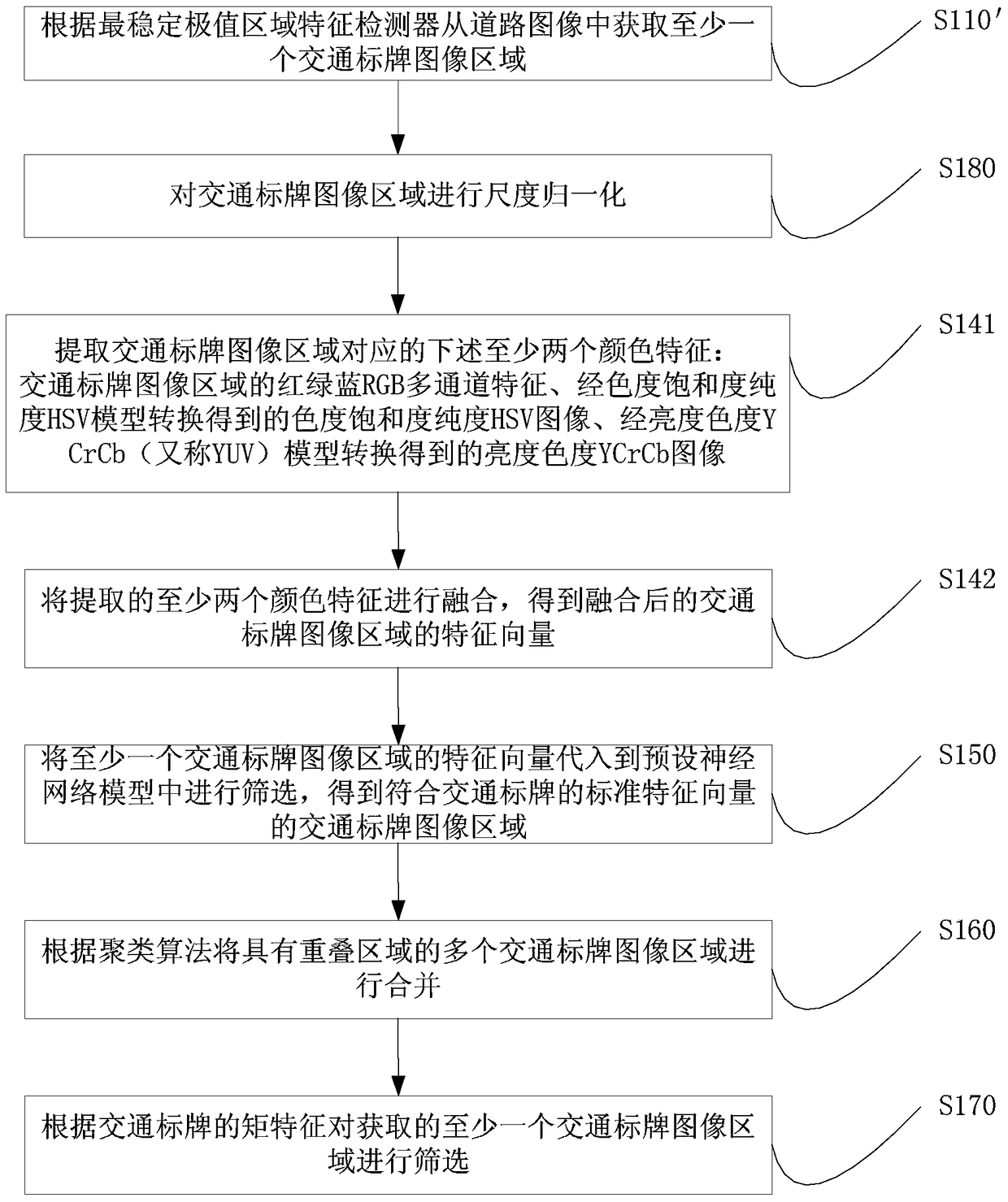
[0033] figure 2 It is a flow chart of the traffic sign matching method provided in Embodiment 2 of the present invention, wherein, S110, acquiring at least one traffic sign image area from the road image, can be implemented in the following manner:
[0034] S110'. Acquire at least one traffic sign image region from the road image according to the Most Stable Extremal Regions (Maximally Stable Extremal Regions, MSER) feature detector.
[0035] The MSER feature detector is used to find the most stable regions in the image when the image is binarized using different grayscale thresholds. The MSER extraction process is as follows: first, use a series of gray thresholds to binarize the image; then, for the binary image obtained by each threshold, obtain the corresponding black area and white area; The area that maintains shape stability within the threshold range (such as 10-250) is extracted as the image area of the traffic sign.
[0036] In actual use, traffic signs should...
Embodiment 3
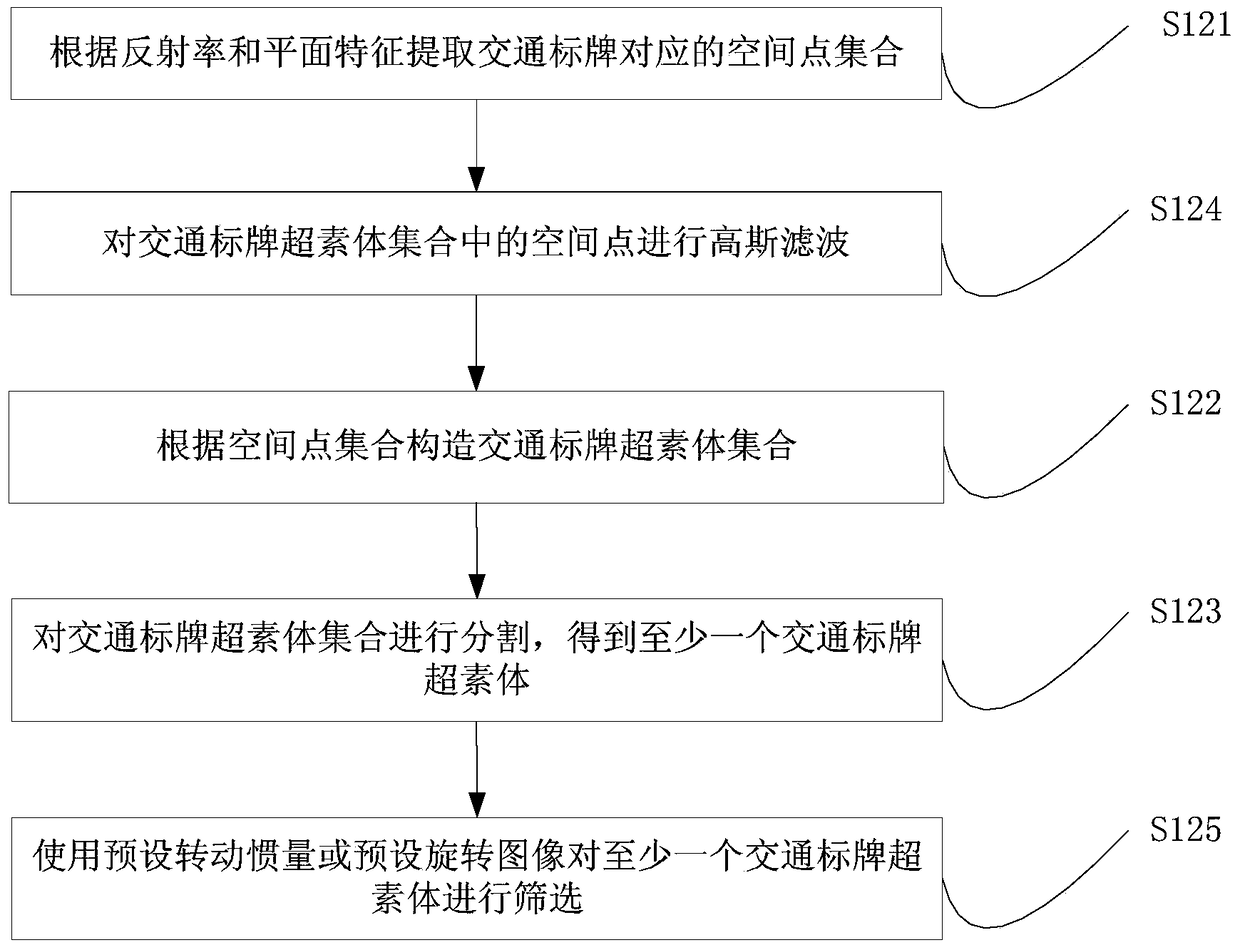
[0085] image 3 The flow chart of the traffic sign matching method provided by Embodiment 3 of the present invention, S120, obtaining at least one traffic sign super-body from the point cloud data, can be implemented in the following manner:
[0086] S121. Extract a set of spatial points corresponding to the traffic sign according to the reflectivity and plane features.
[0087] Spatial points have not only location information but also attribute information. Attribute information includes: directional features, color features, reflectivity, etc. of spatial points. A planar feature refers to a feature capable of forming a plane. Due to the shape characteristics of the traffic sign itself, its shape is a sheet. Therefore, it is necessary to find the set of spatial points forming a plane from the point cloud data. In addition, the physical traffic sign has certain radiation characteristics, so that it can provide the necessary instructions for drivers or pedestrians in the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More