

Free-travel contact gear flat clip adaptive robot finger device
A robot finger and contact technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of inability to realize coupling adaptive grasping mode, high manufacturing cost, lack of flexibility, etc., and achieve light weight, assembly and maintenance Low cost, stable and reliable gripping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific structure and working principle of the present invention will be described in further detail below with reference to the drawings and embodiments.
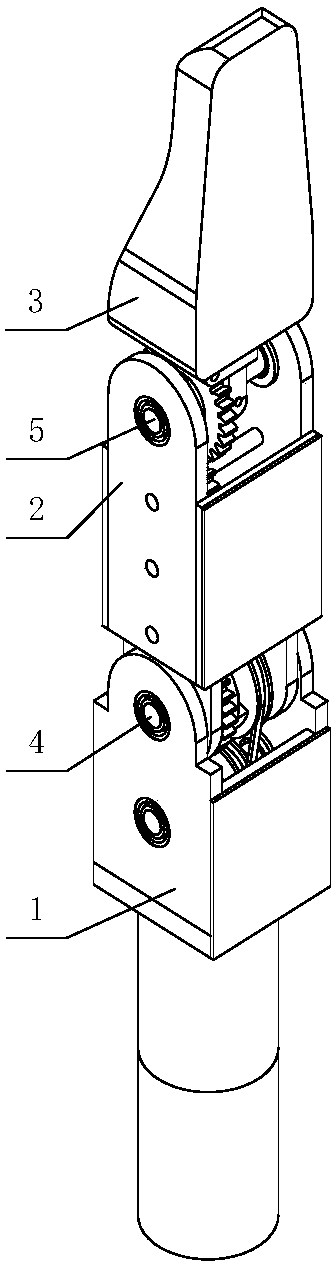
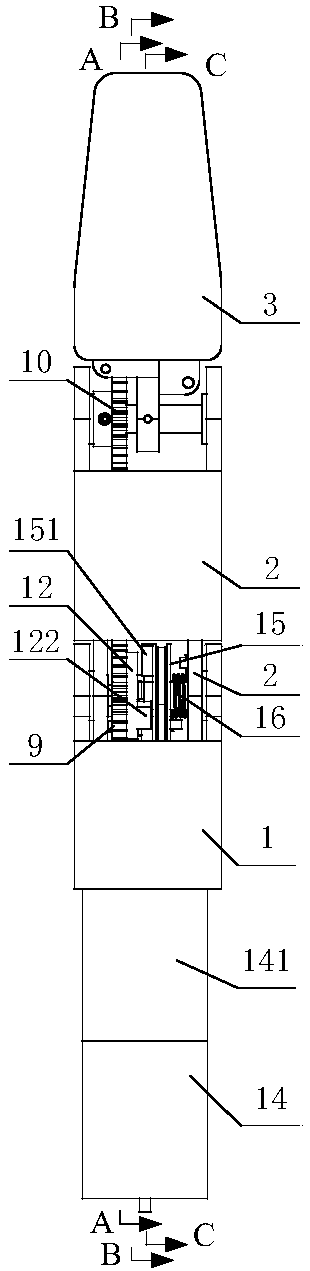
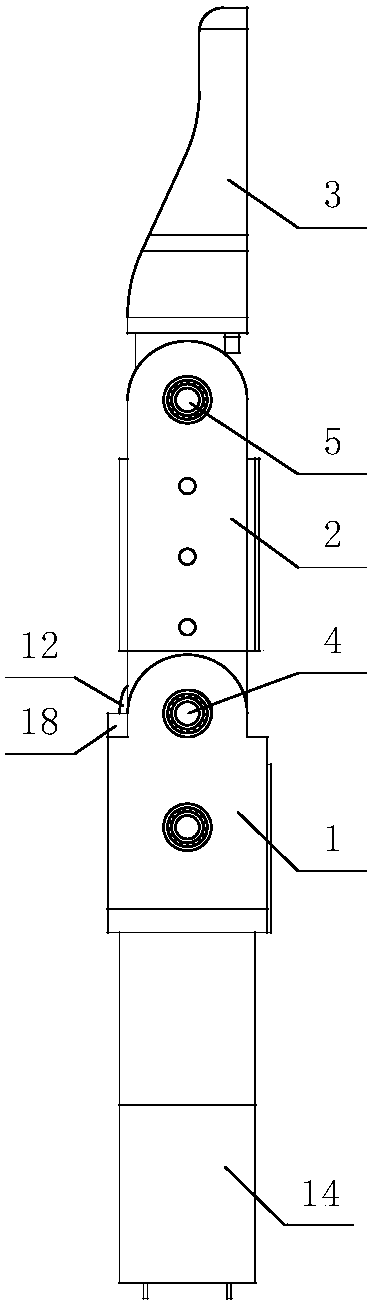
[0040] An embodiment of the self-adaptive robot finger device designed by the present invention for a free-range contact type gear flat clamp, such as Figure 1 to Figure 8 As shown, it includes a base 1, a first finger segment 2, a second finger segment 3, a proximal joint shaft 4, a distal joint shaft 5, and a driver 14; the driver 14 is fixed to the base 1; the proximal joint shaft 4 The center line of is parallel to the center line of the distal joint axis 5. This embodiment also includes a transmission mechanism, a dial 15, a first gear 9, a second gear 10, a transmission gear set 11, a cam dial 12, a first spring member 13, a second spring member 16 and a limit projection 18 The proximal joint shaft 4 is movably sleeved in the base 1; the distal joint shaft 5 is movably sleeved in the first finger section 2;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More