

Toothed-belt connecting rod series and parallel connection composite grasping robot finger device
A technology of robot fingers and connecting rods, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve the problem of not having flat gripping and coupling gripping modes, unable to achieve flat gripping adaptive gripping, and unable to achieve coupled adaptive gripping and other problems, to achieve the effect of good driving effect, compact structure and many grasping modes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solution of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and specific embodiments.
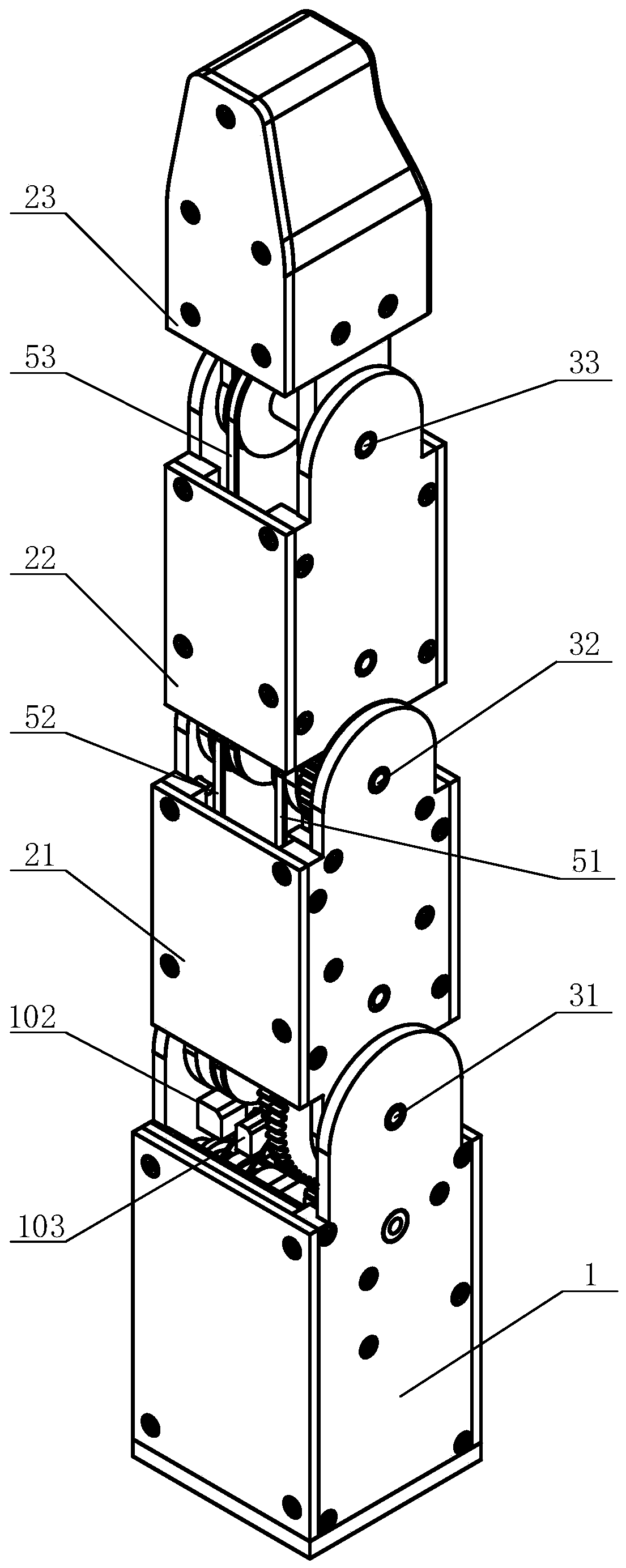
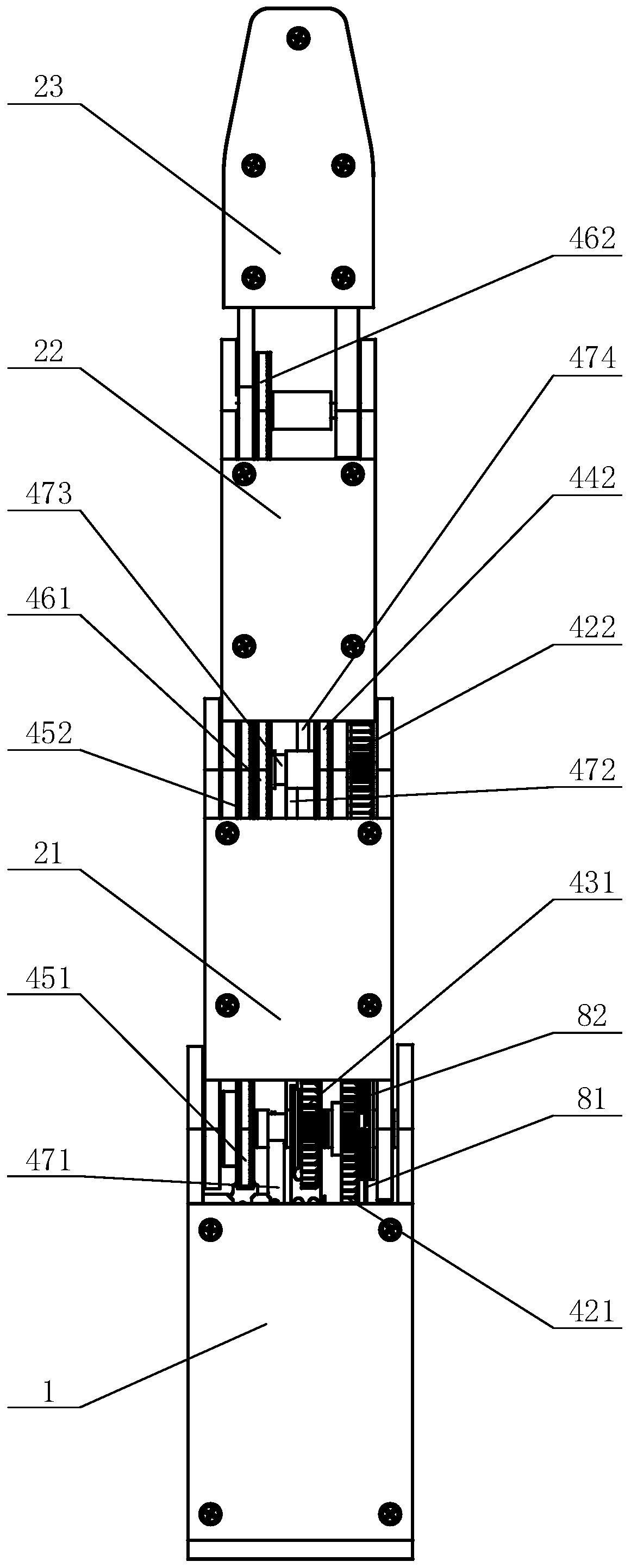
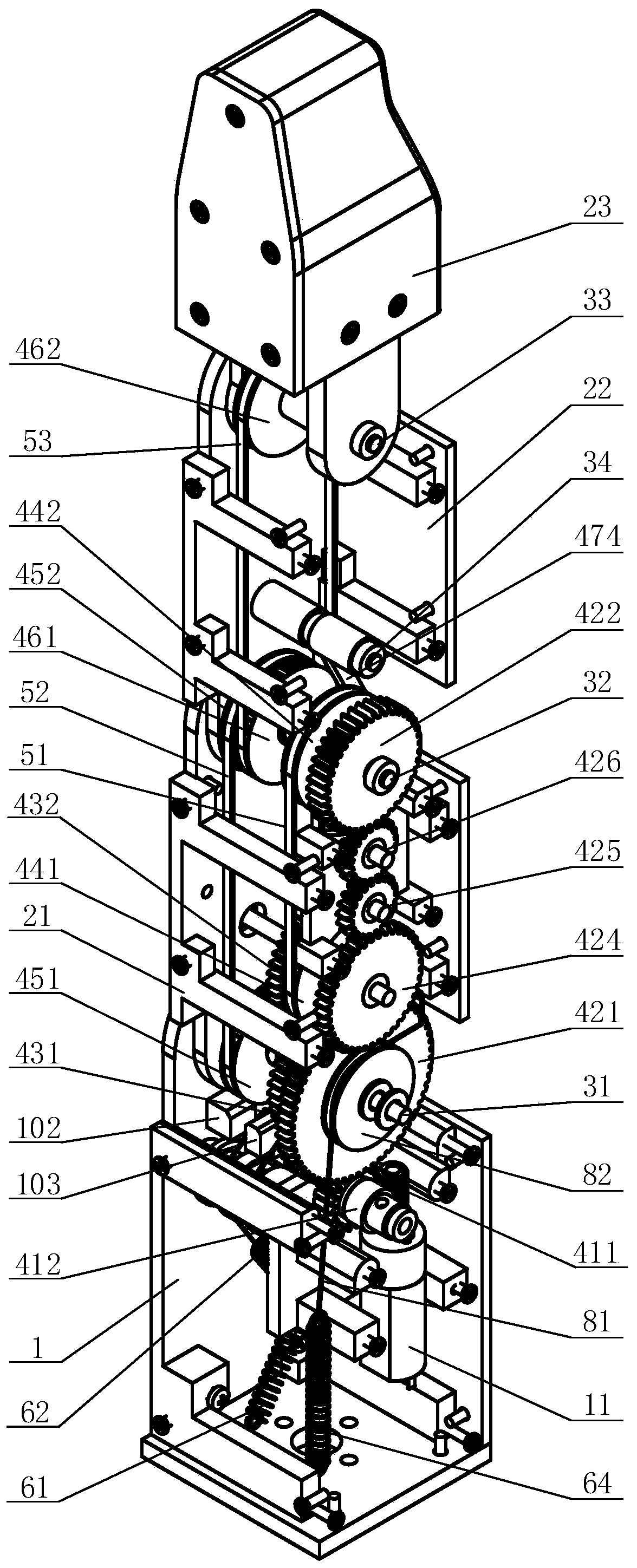
[0039] see Figure 1 to Figure 10 , an embodiment of the toothed belt connecting rod series-parallel hybrid compound grasping robot finger device designed for the present invention, including a base 1, a first finger segment 21, a second finger segment 22, a proximal joint shaft 31, a middle joint Shaft 32, motor 11, worm gear transmission mechanism, first gear transmission mechanism, second gear transmission mechanism, first transmission gear 421, second transmission gear 422, third transmission gear 431, first spring member 61, second spring 62, the first limit block 101, the second limit block 102, the first bump 71 and the second bump 72; the motor 11 is fixedly connected to the base 1; the worm gear mechanism is arranged on the base 1, including a worm 411 as the input end of the transmission mecha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More