

Robot hand-eye calibration method based on laser range finding
A robotic hand, laser ranging technology, applied in the directions of manipulators, instruments, measuring devices, etc., can solve the problems of elastic deformation and fracture of the probe end, force information error of the contact point, and a large influence of the cumulative error, and achieves fast calibration speed, High precision and simple operation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to facilitate a better understanding of the purpose, structure, features, and effects of the present invention, the present invention will now be further described in conjunction with the accompanying drawings and specific embodiments.
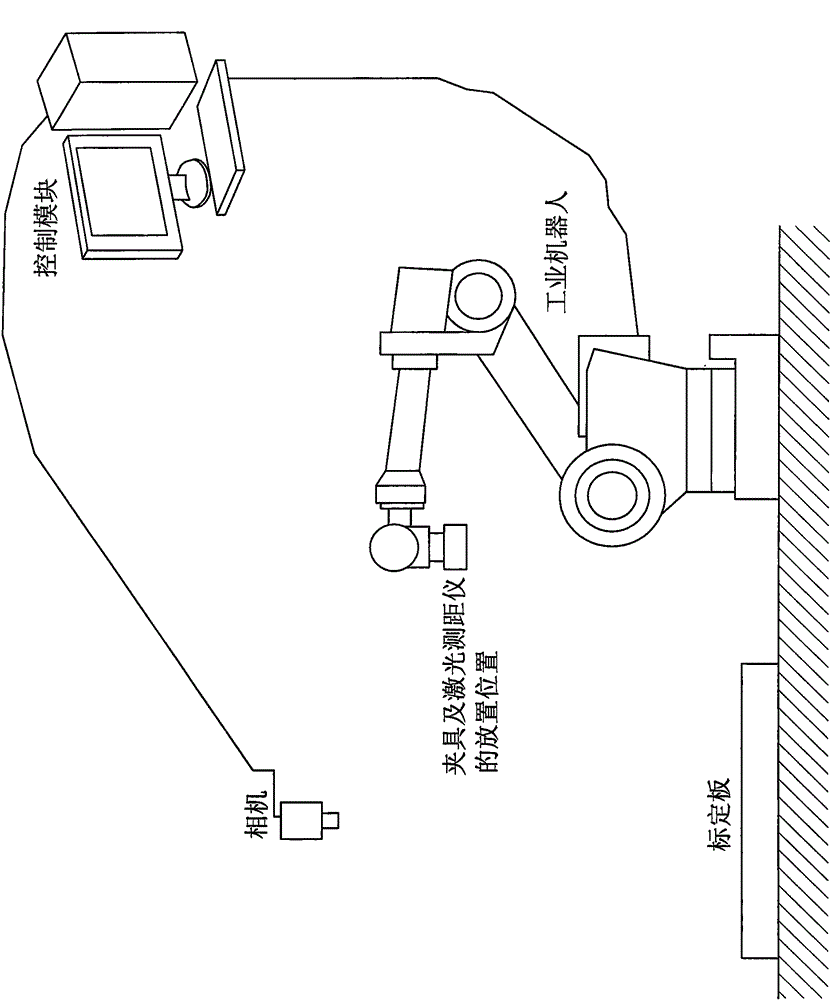
[0019] like image 3 As shown, the present invention proposes a robot hand-eye calibration method based on laser ranging, which mainly consists of a camera, a robot, a calibration board and a laser range finder.
[0020] The calibration board is set in the field of view of the camera, the laser rangefinder is used to emit laser spots to the calibration board, the camera is fixed above the working area, and is mainly used to perceive the external environment, and the image acquired in real time The data is sent to a control module for post-processing; the robot is the main actuator and is used to grasp the workpiece.
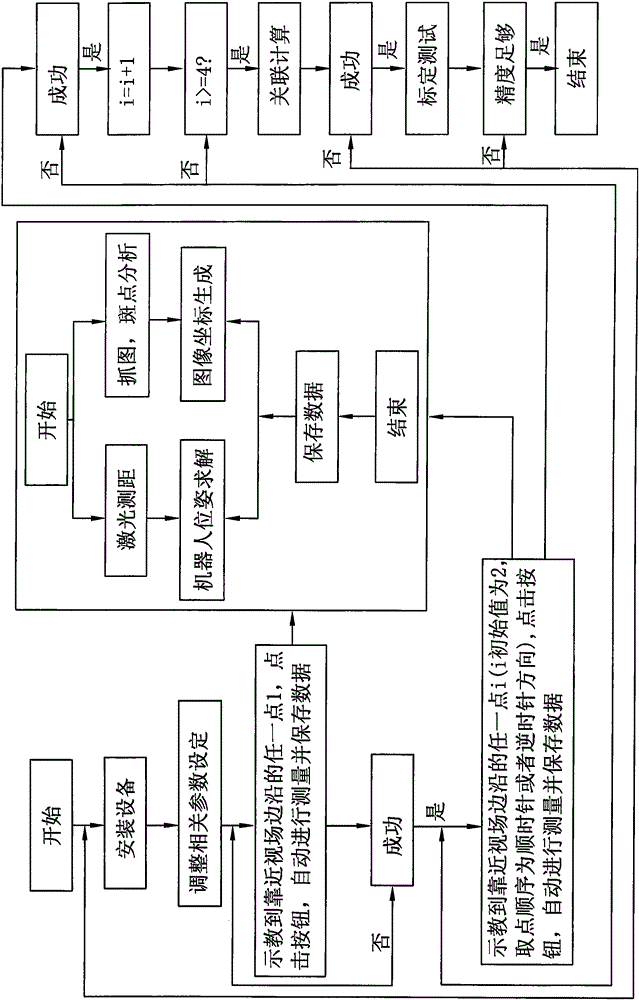
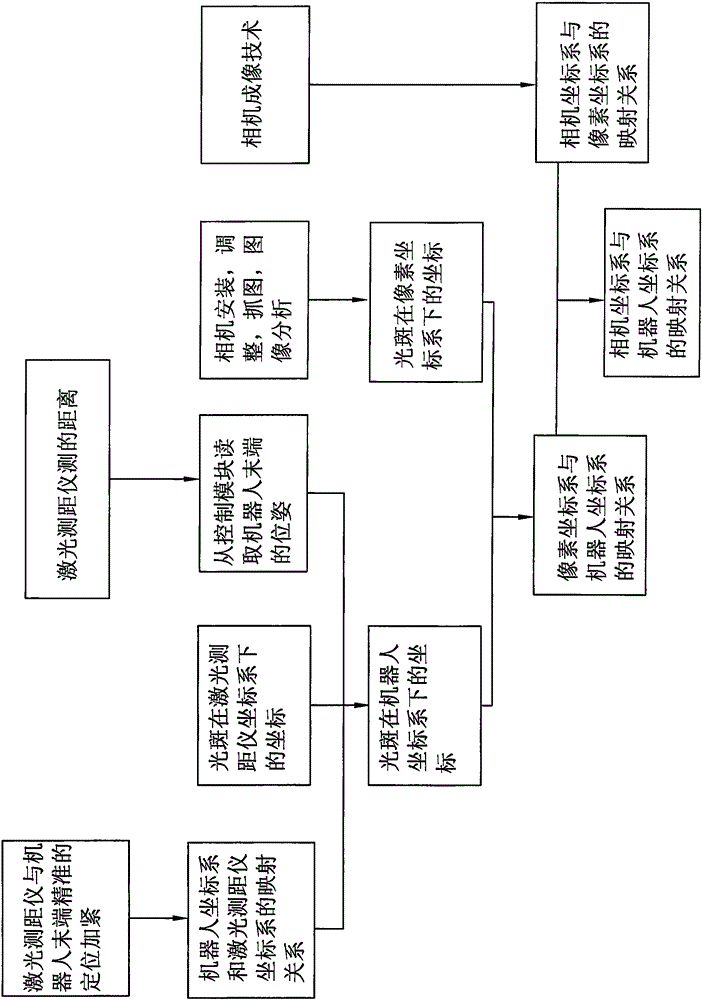
[0021] The distance between the laser spot emitted by the laser rangefinder and the calibration plate is calcu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More