

Engagement driving traveling wheel structure, mechanical structure of line inspection robot and its obstacle surmounting method
A line inspection robot and mechanical structure technology, applied in the field of robots, can solve the problems of no obstacle crossing function, inability to cross, inability to realize continuous inspection of ultra-high voltage transmission lines, etc., to achieve simple and compact structure design and increase clamping force. , the effect of increasing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
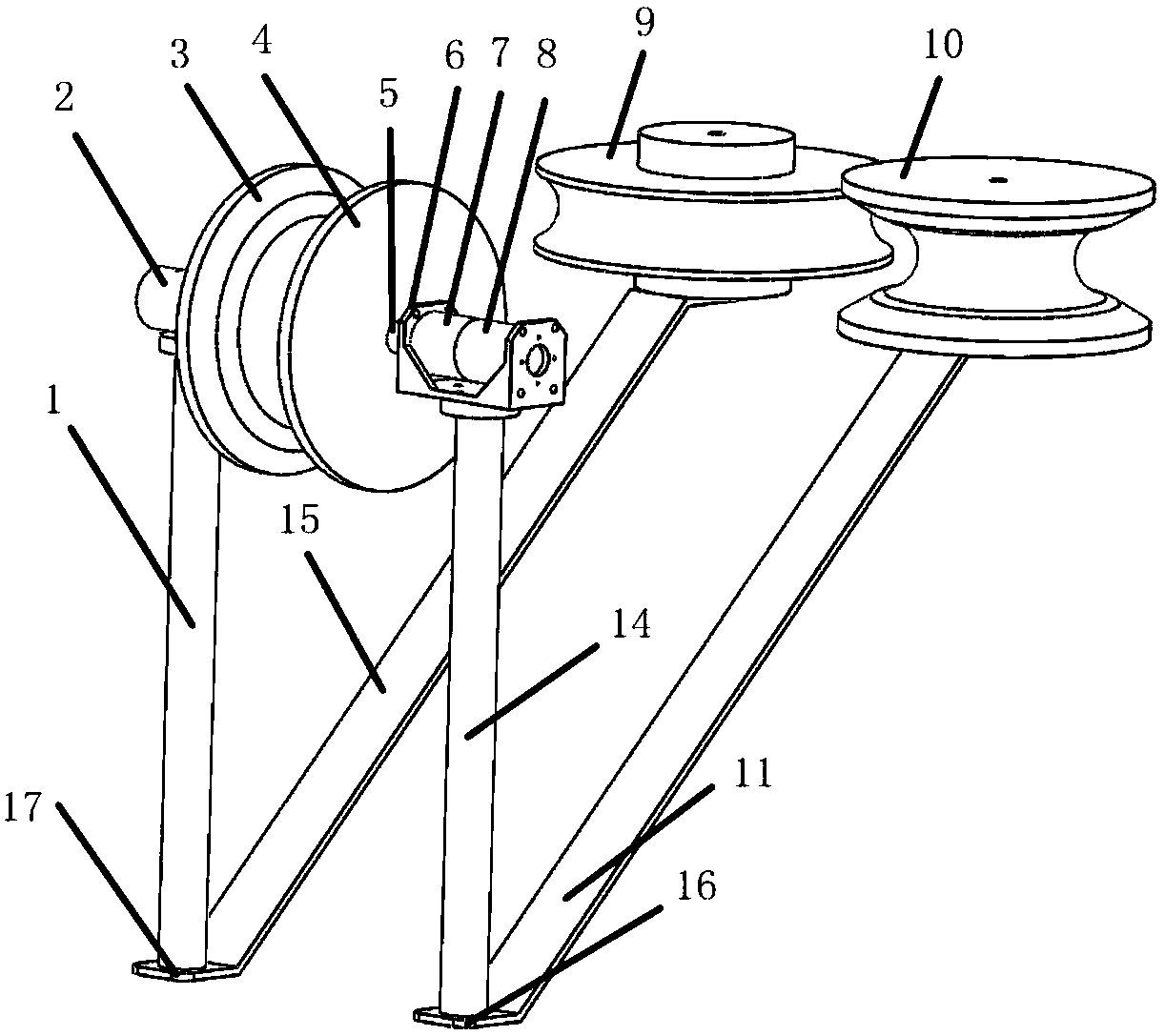
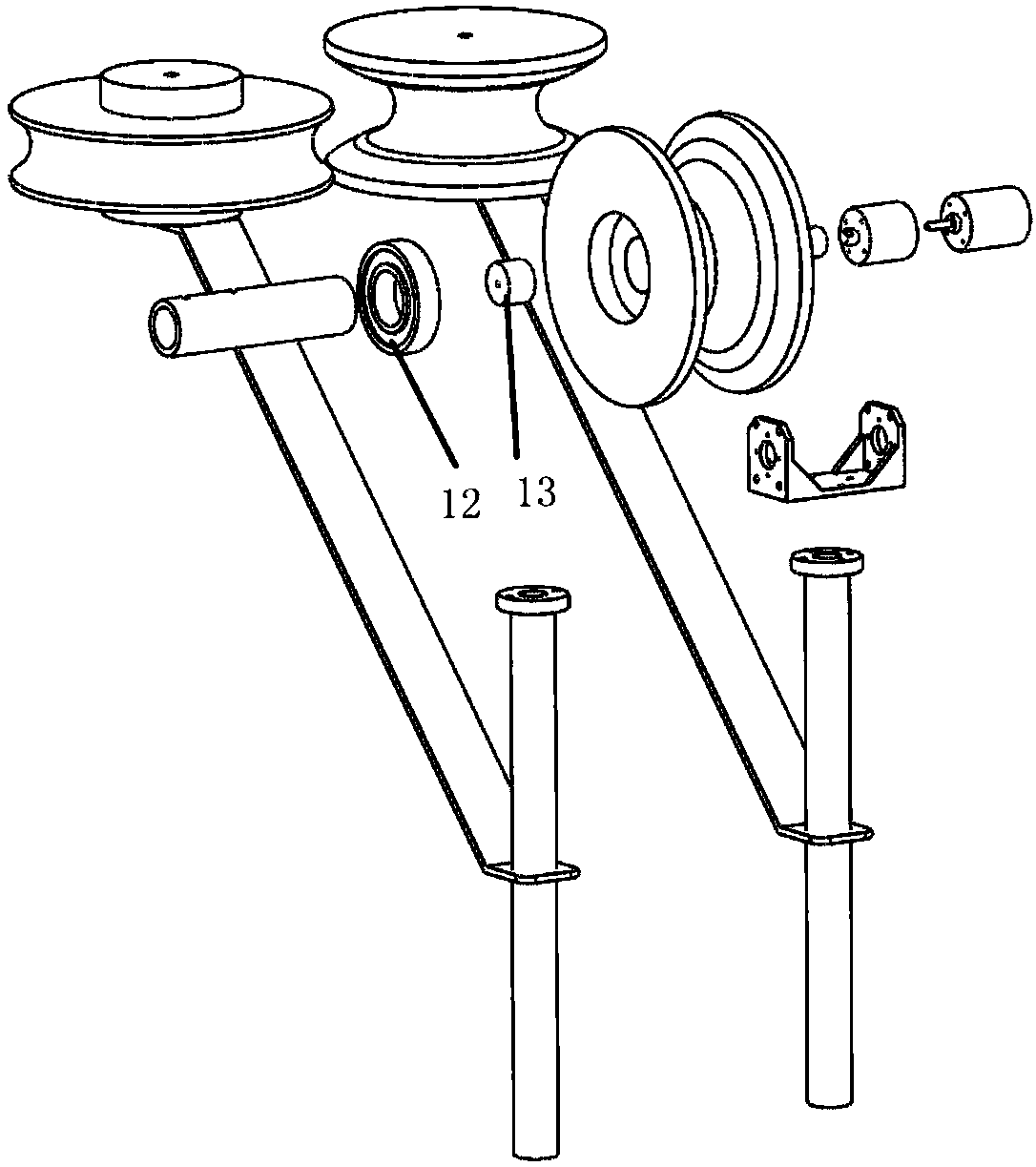
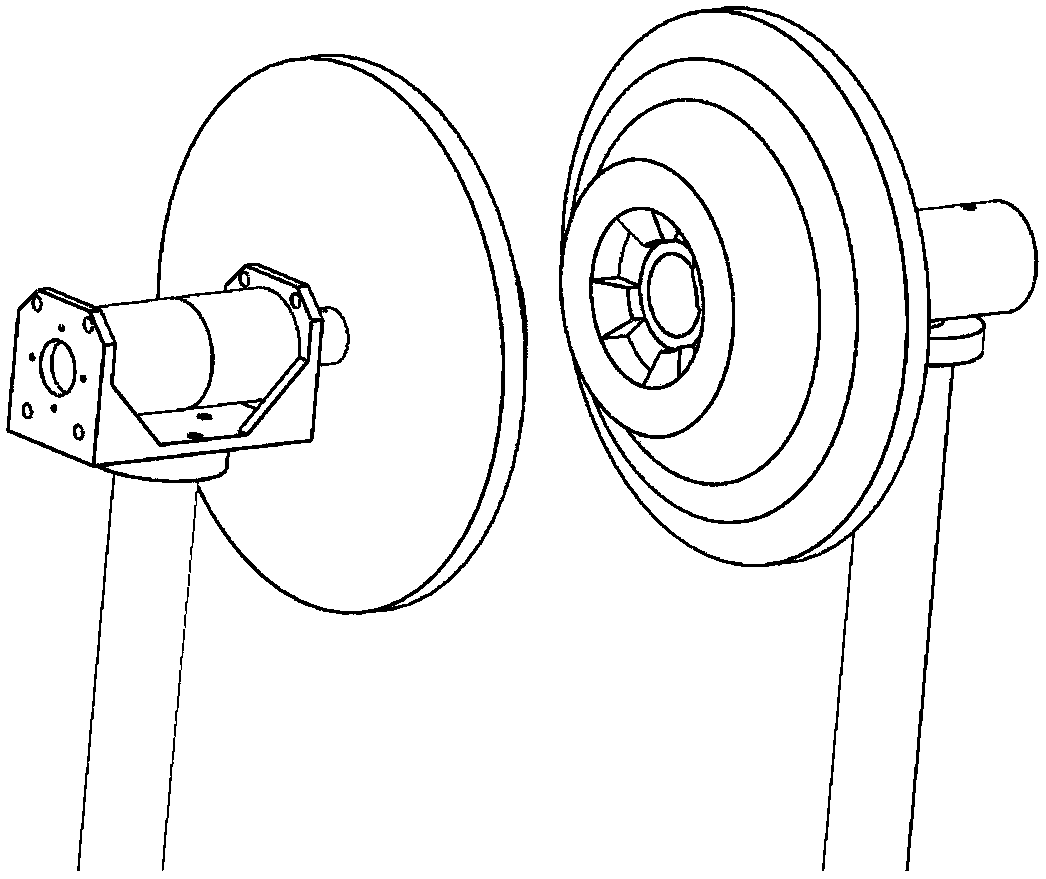
[0018] In one aspect, the present invention provides intermeshing drive road wheel structures such as figure 1 , figure 2 As shown, at least one walking unit is included, wherein the walking unit includes at least one pair of split wheels and a pair of side clamping wheels, such as image 3 , Figure 4 , Figure 5 As shown, the splitting wheel includes an active splitting wheel 4 and a passive splitting wheel 3 that can be docked and separated from each other, and the side clamping wheel includes an enveloping clamping wheel 10 and a clamping side wheel 9 that can fit and separate from each other, The bottom of the active splitting wheel 4 and the passive splitting wheel 3 are respectively provided with the first traveling wheel arm 14 and the secon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More