

Photovoltaic power station cleaning robot achieving direct dust removal on basis of draught fan and working method of photovoltaic power station cleaning robot
A technology for cleaning robots and photovoltaic power plants, applied in the field of intelligent robots, can solve the problems of limited effective working time, unrealized cleaning function, low efficiency, etc., to achieve the effect of satisfying fast and efficient cleaning work, improving work efficiency, and reducing dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
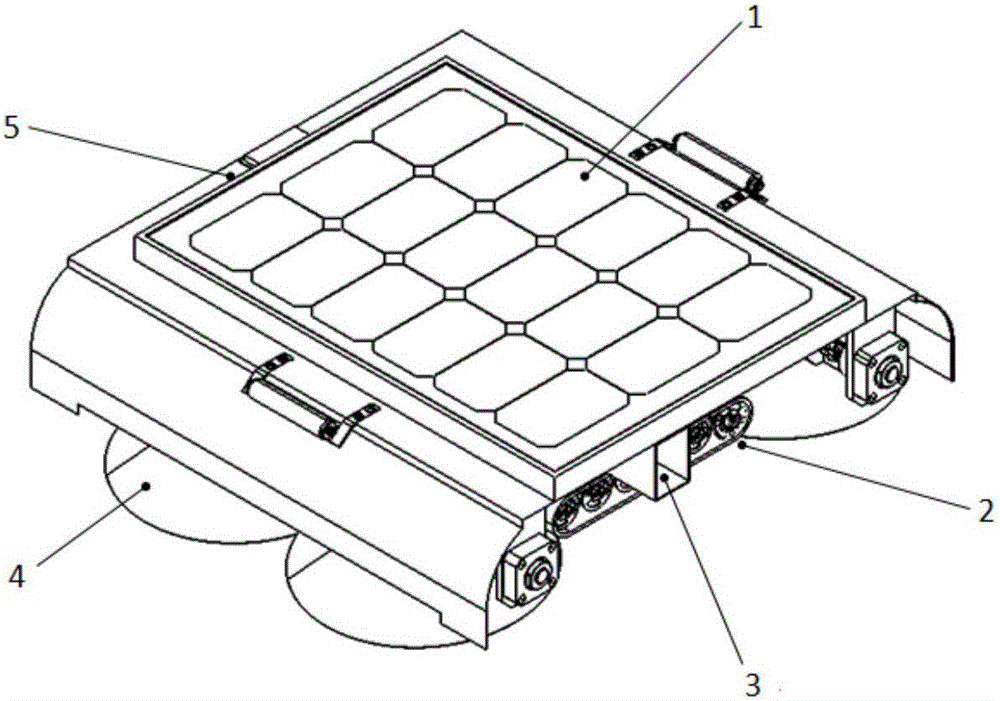
[0024] The structure of the present embodiment robot is as figure 1 As shown, the power system 1 includes a solar panel, a controller, a supercapacitor assembly connected to the controller, and the like. The walking system 2 includes crawler walking components, walking motors, etc., through a motor on the left and right sides of the fuselage, respectively drive the track wheels on both sides, so that the unilateral crawler can advance, retreat, stand still, speed up, and decelerate on the surface of the solar panel. Realize the walking and turning functions of the robot. The dust removal system 3 includes a centrifugal fan, a motor, an output air duct, and the like. The cleaning system 4 includes a disc brush assembly, a transmission gear assembly and a drive motor, etc., and the drive motor drives the disc brush assembly to make the disc brush rotate at a constant or variable speed on the surface of the solar panel. The control system 5 includes an MCU main board, various s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More