

Geometric Constraint Pose Method Based on Perspective Projection Line
A technology of perspective projection and geometric constraints, applied in the field of monocular vision pose calculation, can solve the problems of low measurement accuracy and small measurement range, achieve good technical advantages, and improve the effect of pose calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
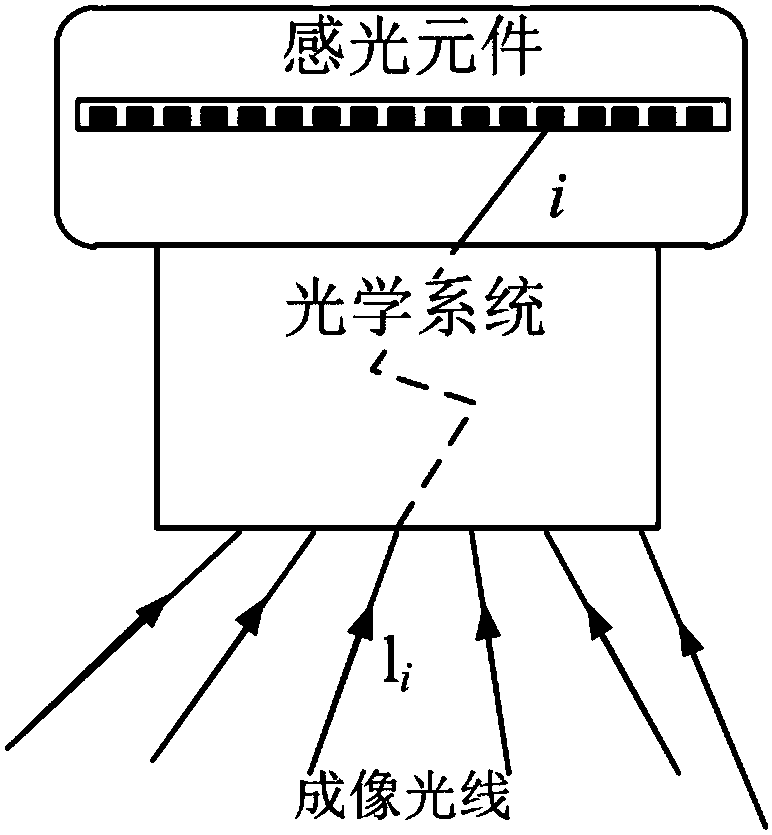
[0036] Such as figure 1 As shown, during the imaging process of the visual sensor, the point on the photosensitive element has one and only one imaging ray corresponding to it. Based on this phenomenon, the present invention proposes a geometrically constrained pose algorithm based on perspective projected straight lines.
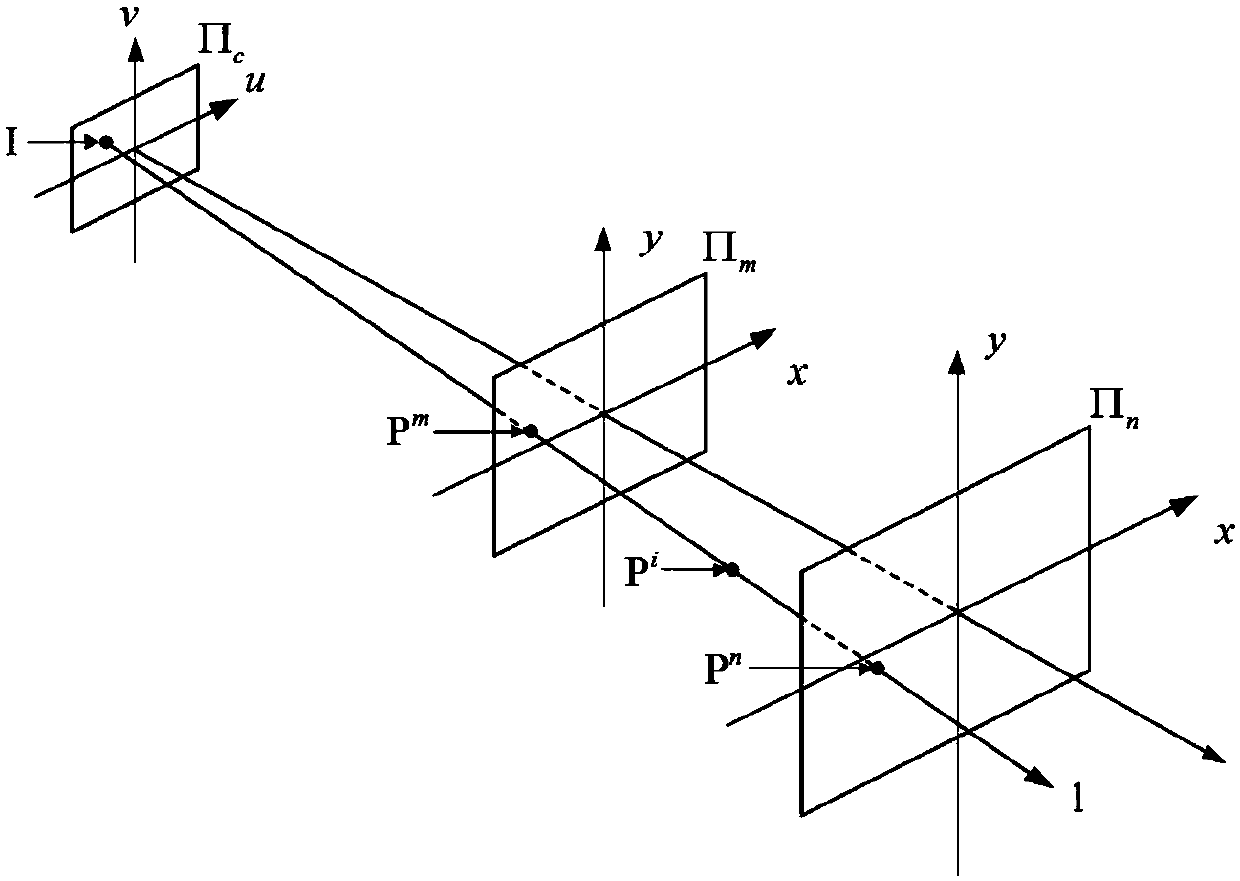
[0037] Due to the complexity of the imaging ray path, its mathematical equivalent is a perspective projection straight line in the process of describing the geometric characteristics of the imaging system, such as figure 2 shown. figure 2 in, Π c is the photosensitive plane, 1 is the perspective projection line, point P i is the target point to be measured located on the perspective projection line 1. observe figure 2 It can be seen that any perspective projection line 1 passes through the plane Π m and plane Π n , sympathetic light plane Π c At point I. Then the perspective projection line 1 can be compared with the plane Π m intersection poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More