

Visual SLAM method based on semantic optical flow and inverse depth filtering
A deep filtering and semantic technology, which is applied in the direction of character and pattern recognition, 2D image generation, and extraction from basic elements, etc., can solve the problem that the visual positioning system is susceptible to interference, achieve good performance, excellent precision, and improve calculation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
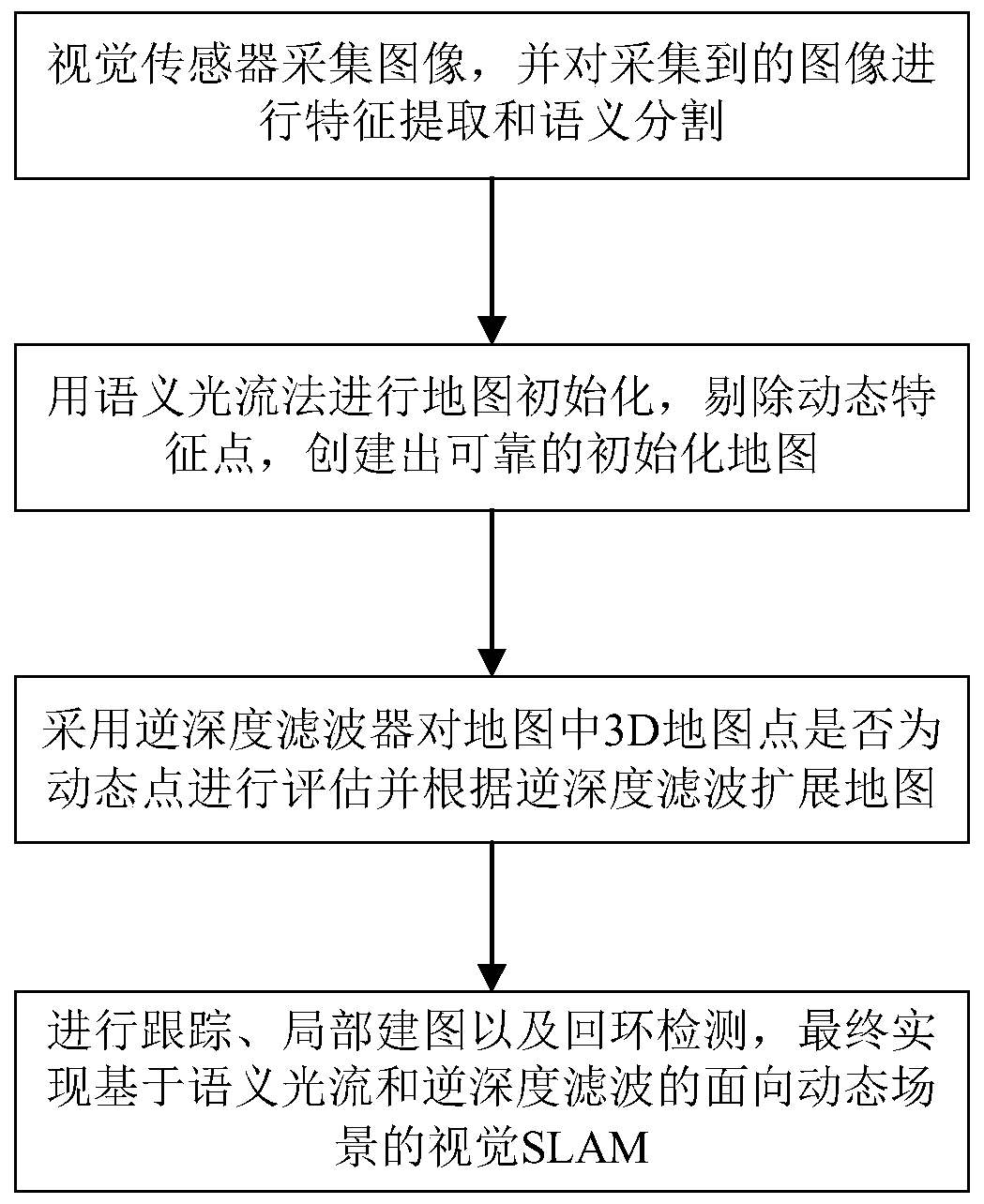
[0035] like figure 1 Shown, the concrete realization steps of the present invention are as follows:
[0036] Step 1. The image data collected by the sensor will be obtained, image feature points will be extracted, and the RGB image of the current frame will be semantically segmented using the SegNet semantic segmentation network. Feature points are classified into static, latent dynamic and dynamic categories by semantic information. Among them, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More