

Method and device for controlling UAV tracking and shooting
An unmanned aerial vehicle and a technology for adjusting the direction, applied in the field of shooting, can solve the problems of low accuracy of tracking shooting technology, easy tracking failure, environmental limitations, etc., to improve the quality of shooting images, avoid tracking lost targets, and simplify human operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
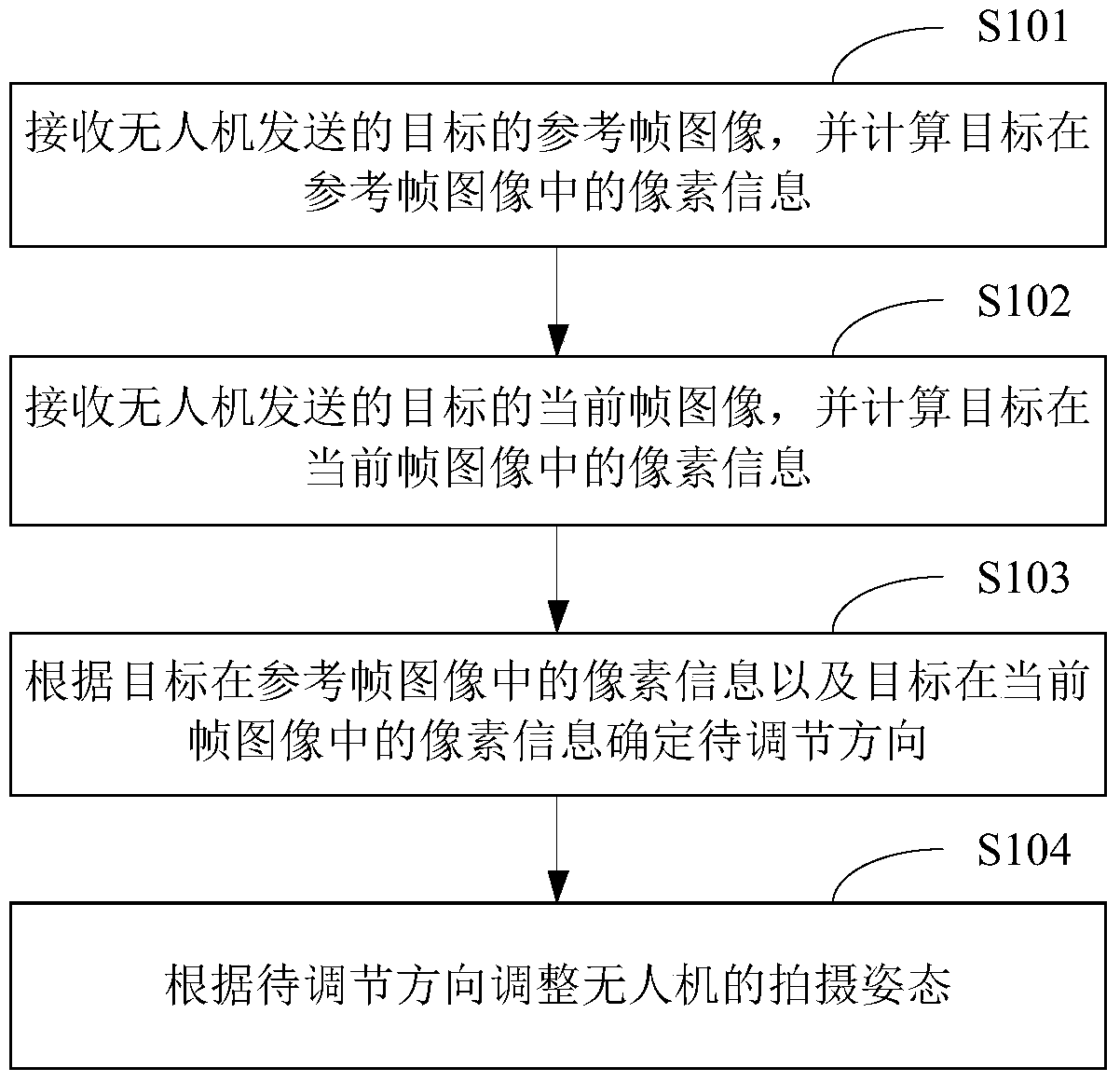
[0074] figure 1 A flow chart showing the implementation of the method for controlling UAV tracking and shooting according to an embodiment of the present invention is shown. Such as figure 1 As shown, the method mainly includes:
[0075] In step S101, the reference frame image of the target sent by the drone is received, and the pixel information of the target in the reference frame image is calculated.
[0076] It should be noted that the execution subject of the embodiment of the present invention may be a ground station, and the ground station may be an intelligent terminal such as a mobile phone or a palm computer, which is not limited herein.
[0077] Here, calculating the pixel information of the target in the reference frame image includes: using an image processing algorithm to obtain the contour information of the target in the reference frame image, converting the contour information of the target in the reference frame image into contour coordinates, and Take N...
Embodiment 2
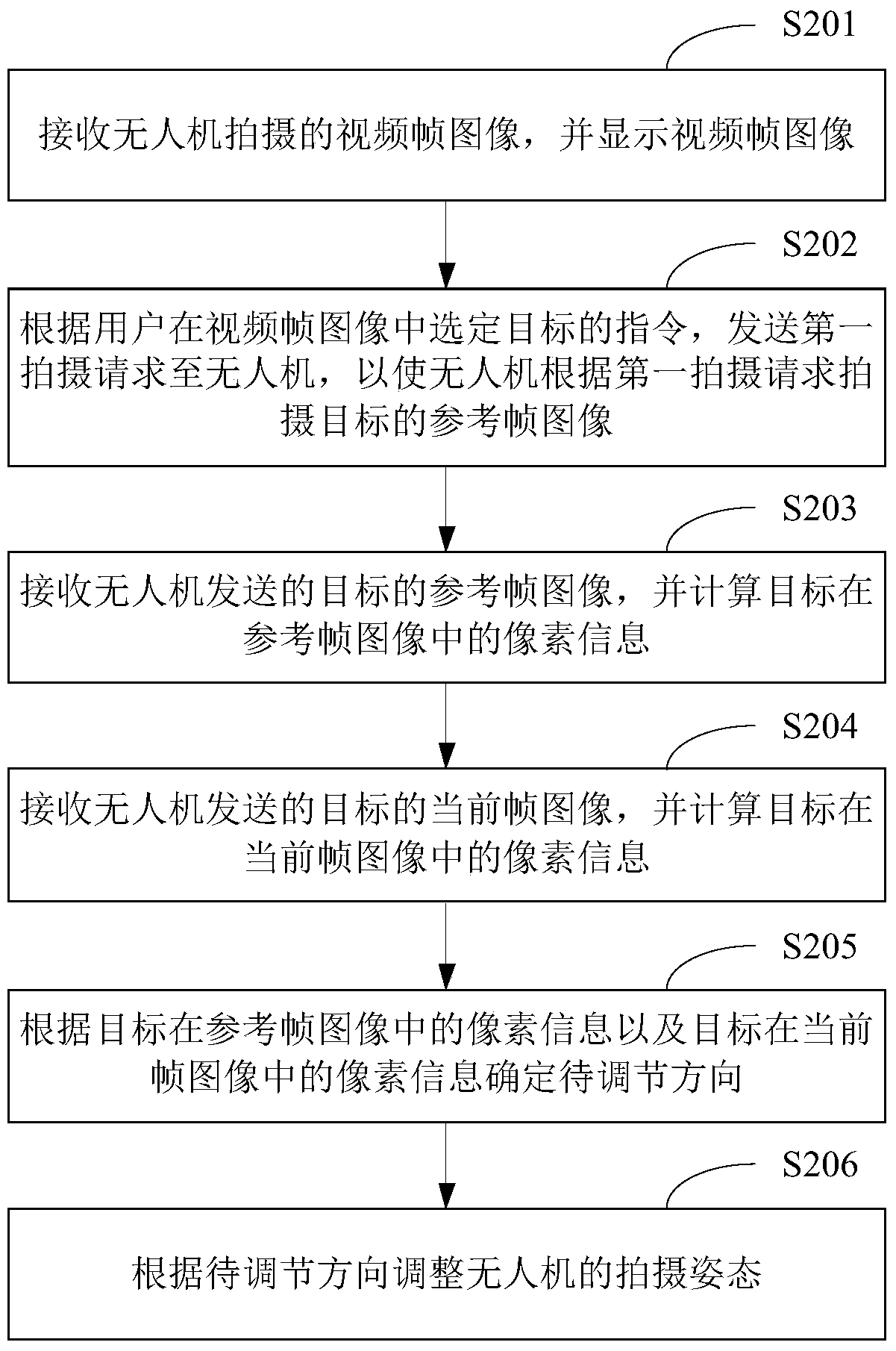
[0098] Figure 4 A flow chart showing the implementation of a method for controlling UAV tracking and shooting according to another embodiment of the present invention is shown. Such as Figure 4 As shown, the method mainly includes:
[0099] In step S401, the reference frame image of the target sent by the drone is received, and the number of pixels of the target included in the reference frame image is calculated to obtain the first number of pixels.
[0100] In step S402, the current frame image of the target sent by the drone is received, and the number of pixels of the target included in the current frame image is calculated to obtain a second pixel number.
[0101] In step S403, the coordinates of the specified position of the target in the reference frame image are acquired to obtain the first coordinates.
[0102] In step S404, the coordinates of the designated position of the target in the current frame image are acquired to obtain the second coordinates.
[0103]...
Embodiment 3
[0109] Figure 5 A flow chart showing the implementation of a method for controlling UAV tracking and shooting according to another embodiment of the present invention is shown. Such as Figure 5 As shown, the method mainly includes:
[0110] In step S501, the reference frame image of the target sent by the drone is received, and the number of pixels of the target included in the reference frame image is calculated to obtain a first number of pixels.
[0111] In step S502, a rectangular area covering the target is generated in the reference frame image, and the geometric center of the rectangular area coincides with the geometric center of the target.
[0112] In step S503, the current frame image of the target sent by the drone is received, and the number of pixels overlapping the target and the rectangular area in the current frame image is calculated to obtain a third pixel number.
[0113] In step S504, the direction to be adjusted is determined according to the directi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More