

Mechanical exoskeleton hand pressure reduction device for transport worker
A technology for porters and decompression devices, which is applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effects of novel design, safety protection, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
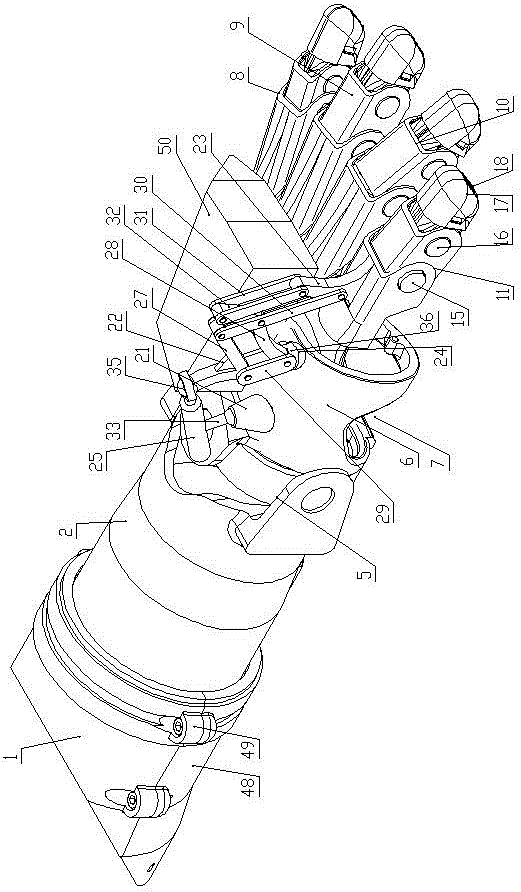
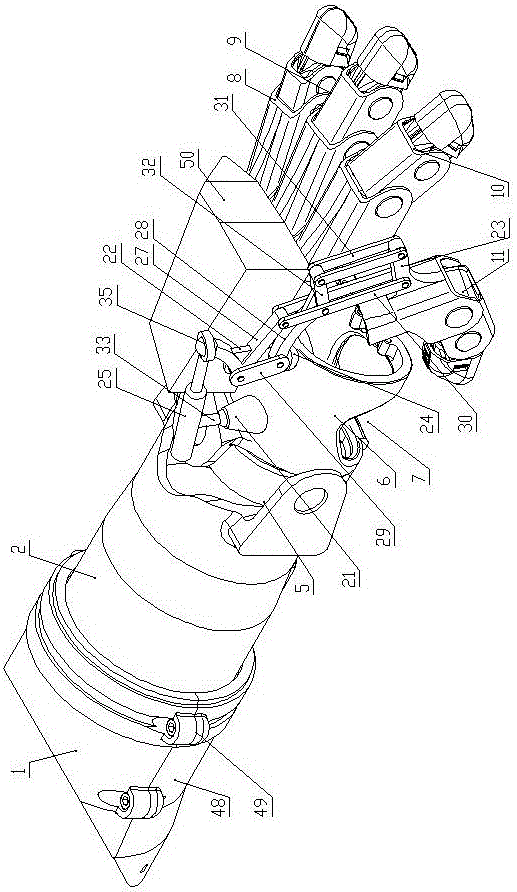
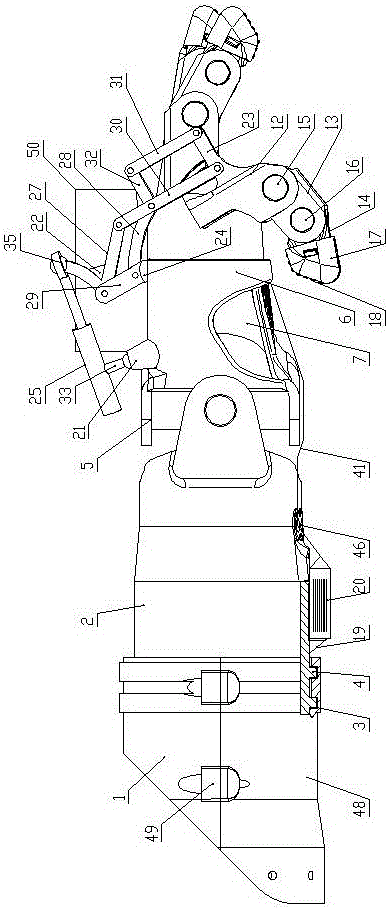
[0029] Such as Figure 1-Figure 6 As shown, the mechanical exoskeleton hand decompression device for porters of the present invention includes a forearm fixing cylinder and a forearm rotating cylinder 2, the front inner wall of the forearm fixing cylinder is provided with two circular grooves 3, and the forearm rotating cylinder 2 is inserted into the rear. Set in the forearm fixed cylinder, the outer wall of the forearm rotating cylinder 2 is provided with two circular ribs 4 for rotation limit in the circular groove 3, the front end of the forearm rotating cylinder 2 is connected with the palm resting cylinder 6 through the wrist universal joint 5, The left or right side of the bottom of the palm placement cylinder 6 is provided with a thumb protruding opening 7, and the top of the palm placement cylinder 6 is connected with the little finger exoskeleton assembly 8, Ring finger exoskeleton assembly 9 , middle finger exoskeleton assembly 10 and index finger exoskeleton assembly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More