

Water strider-like piezoelectric-driven ultramicro flapping-wing amphibious robot
A piezoelectric drive and piezoelectric drive technology, applied in electric vehicles, helicopters, aircraft, etc., can solve problems such as difficulty in completing robot suspension, long-term investigation tasks, lack of adaptability to complex environments, and difficulty in amphibious capabilities. Achieve the effect of light weight, small size and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
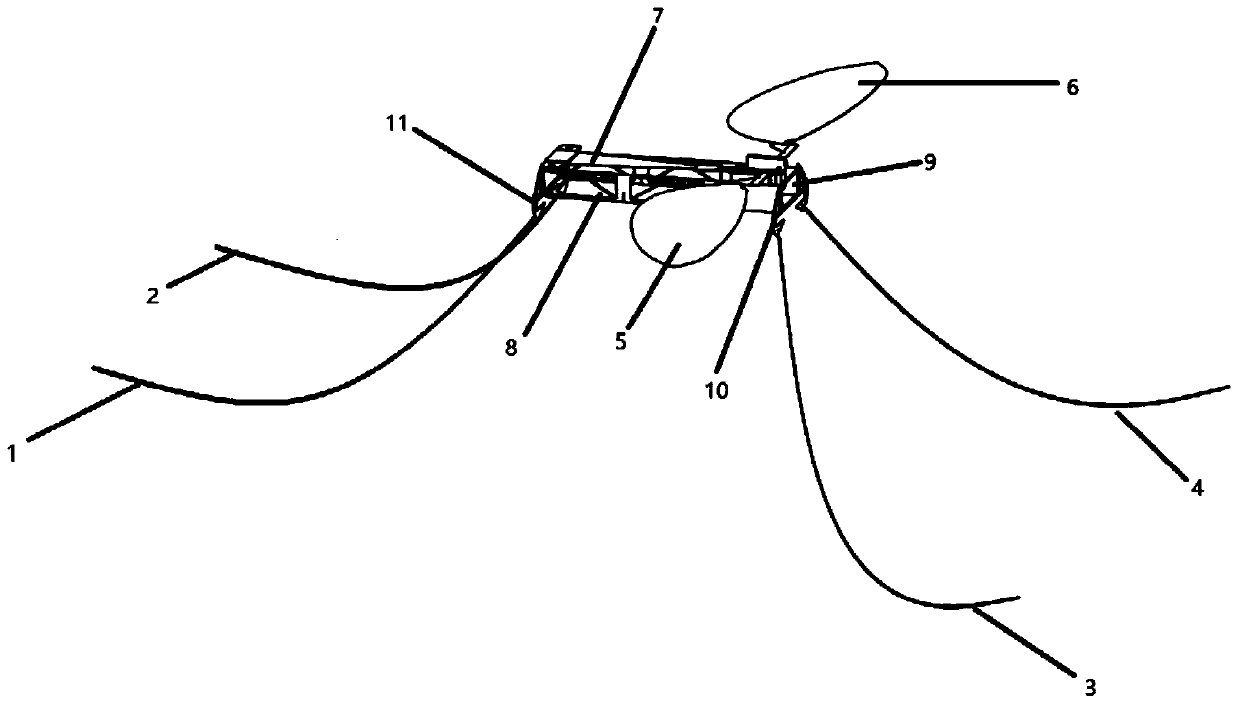
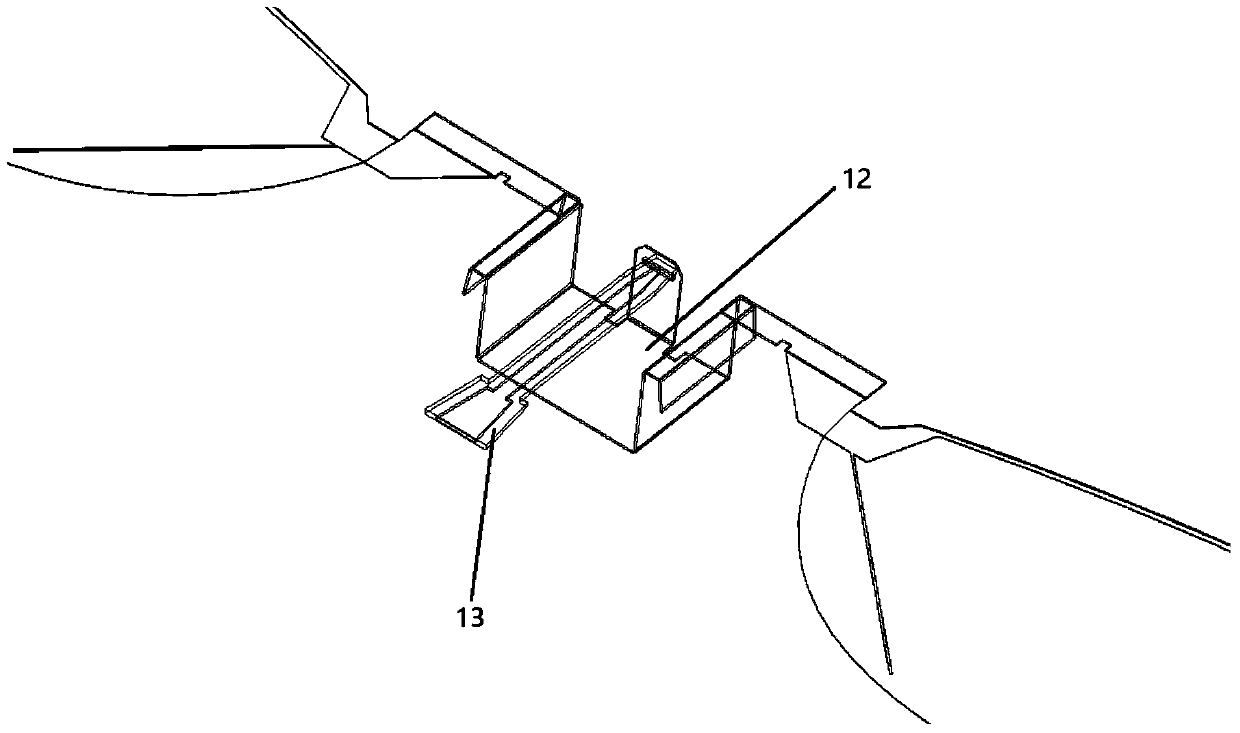
[0035] Such as figure 1 , 2 As shown, a water strider-like piezoelectric-driven ultra-micro flapping wing amphibious robot includes: four highly elastic leg supports 1, 2, 3, 4, two wings 5, 6, a piezoelectric driver 7, Two longitudinal frames 8, 9, two transverse panels 10, 11, a wing mount 12 containing passive hinges, a piezoelectric actuator mount 13; where:
[0036] The highly elastic leg supports 1, 2, 3, 4 are fixedly connected to the transverse panels 10, 11 respectively; the two wings 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More