Telemetry data driven unmanned plane flight state identification method
A technology of telemetry data and flight status, which is applied in navigation computing tools and other directions, and can solve problems such as inconsistent data length, large data volume, and uneven distribution of type samples
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0113] The present invention will be described in further detail below in conjunction with the accompanying drawings: the present embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation is provided, but the protection scope of the present invention is not limited to the following embodiments.
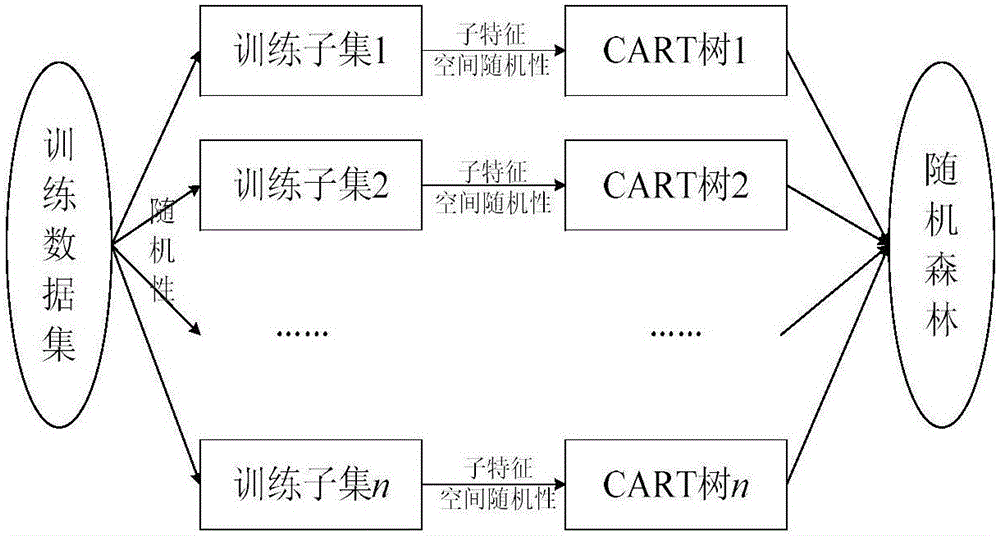
[0114] Chebyshev Fitting Algorithm and Random Forest Algorithm
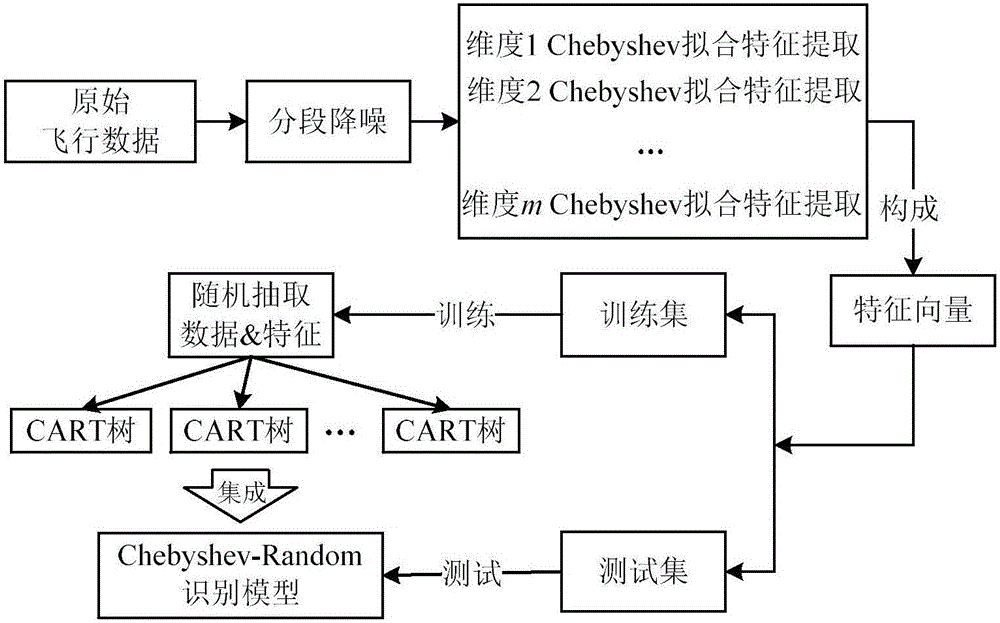
[0115] Based on Chebyshev Feature Extraction-Random Forest Classification Algorithm (C-RF Algorithm)
[0116] At present, during the flight of UAVs, the main basis for monitoring the flight status of UAVs is the telemetry data transmitted by the UAV to the ground, which is the time series data generated by the on-board sensor measurement and control system. The duration of different flight states of the UAV is different during each flight, and the length of the multidimensional time series corresponding to each sample is also different, so it is difficult to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com