

Intraocular surgery robot constrained motion control method
A surgical robot, technology of constrained motion, applied in the field of constrained motion control of intraocular surgical robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in detail below in conjunction with the accompanying drawings. This description is a description of a preferred embodiment of constrained motion control according to the present invention, and does not represent the only form that the present invention can be constructed or used.
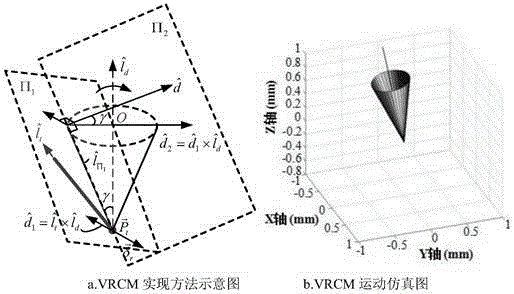
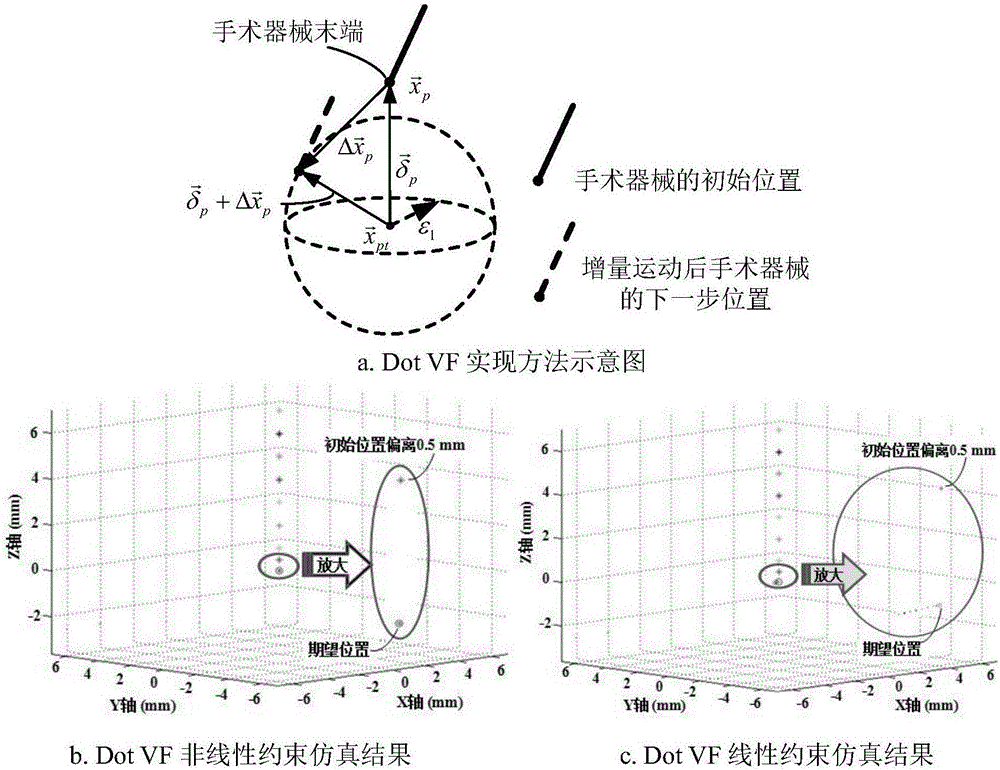
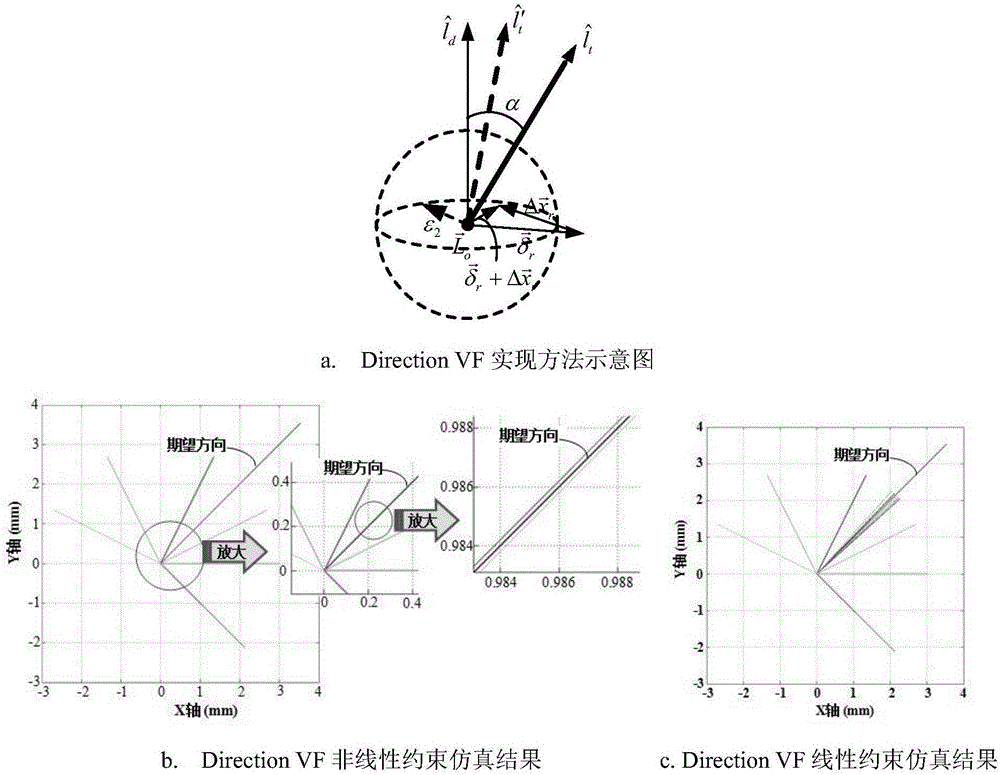
[0074] The constrained motion control method of the intraocular surgical robot provided in this application mainly includes 5 steps, and any one or a combination of multiple steps in the 5 steps can be adopted. It specifically includes (in no particular order): 1. The control step (Dot VF) of the point-constrained virtual fixed primitive, which is: controlling the end of the end device or a certain position in the axial direction of the end device to gradually approach the space 2, the control step (Drection VF) of the virtual fixed primitive of direction constraint, this step is: control the axial direction of described end device to gradually approach ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More