

Planar three-degrees-of-freedom space robot inverse kinematics solution method
A space robot, inverse kinematics technology, applied in data processing applications, prediction, calculation and other directions, can solve the problems of long calculation time, unable to meet the requirements of rapidity, and narrowing the inverse solution range of redundant robots, to meet the rapidity , the solution method is simple and efficient, and the calculation amount is small.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
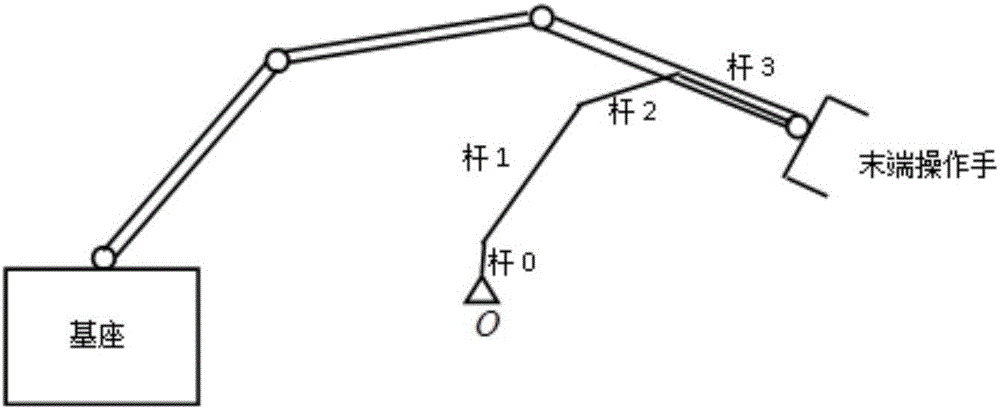
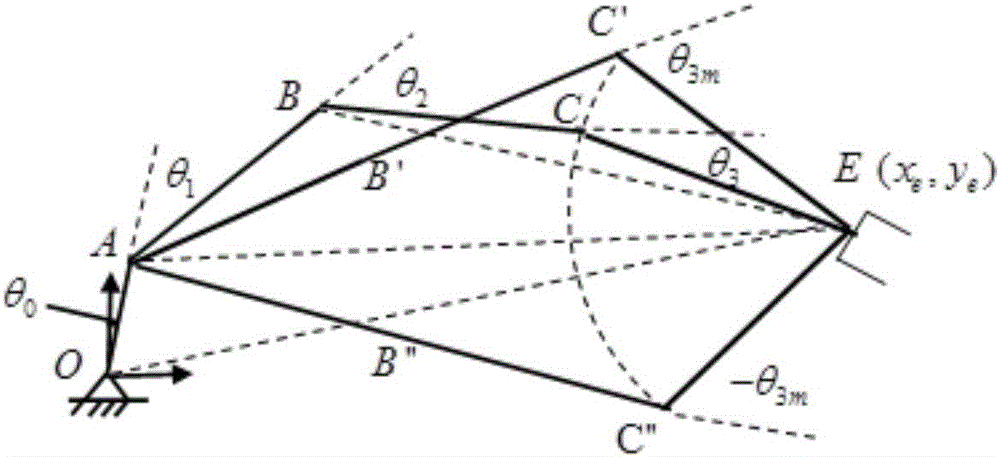
[0016] The technical solution adopted by the present invention to solve the technical problem is: firstly adopt the virtual manipulator method to equivalent the general plane three-degree-of-freedom space robot to a ground-fixed base robot, then analyze the self-motion characteristics of the plane three-degree-of-freedom space robot, Given the initial base attitude angle and the position of the end manipulator, deduce the geometric relationship expressions between the joint angles of the equivalent space robot, and finally solve all the three joint angle combinations, that is, all kinematics Inverse solution.
[0017] The specific solution method is as follows:
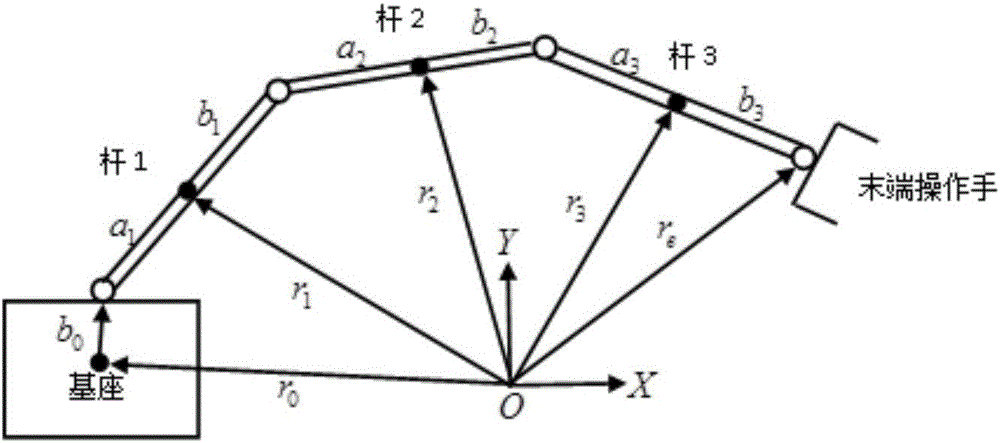
[0018] (1) For the general planar three-degree-of-freedom space robot, its structural form is unique, including a floating base, three connecting rods, three joint shafts and an end manipulator. They are located on the same plane, and the first One connecting rod is connected to the floating base and two adjacent con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More