

End effector of a string-type fruit picking robot
A technology of end effector and picking robot, which is applied to picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of high production cost and limited environmental adaptability, and achieve the effect of simple structure, low noise and stable movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The structure of the end effector of the string-type fruit picking robot of the present invention will be described in detail below in conjunction with the accompanying drawings.
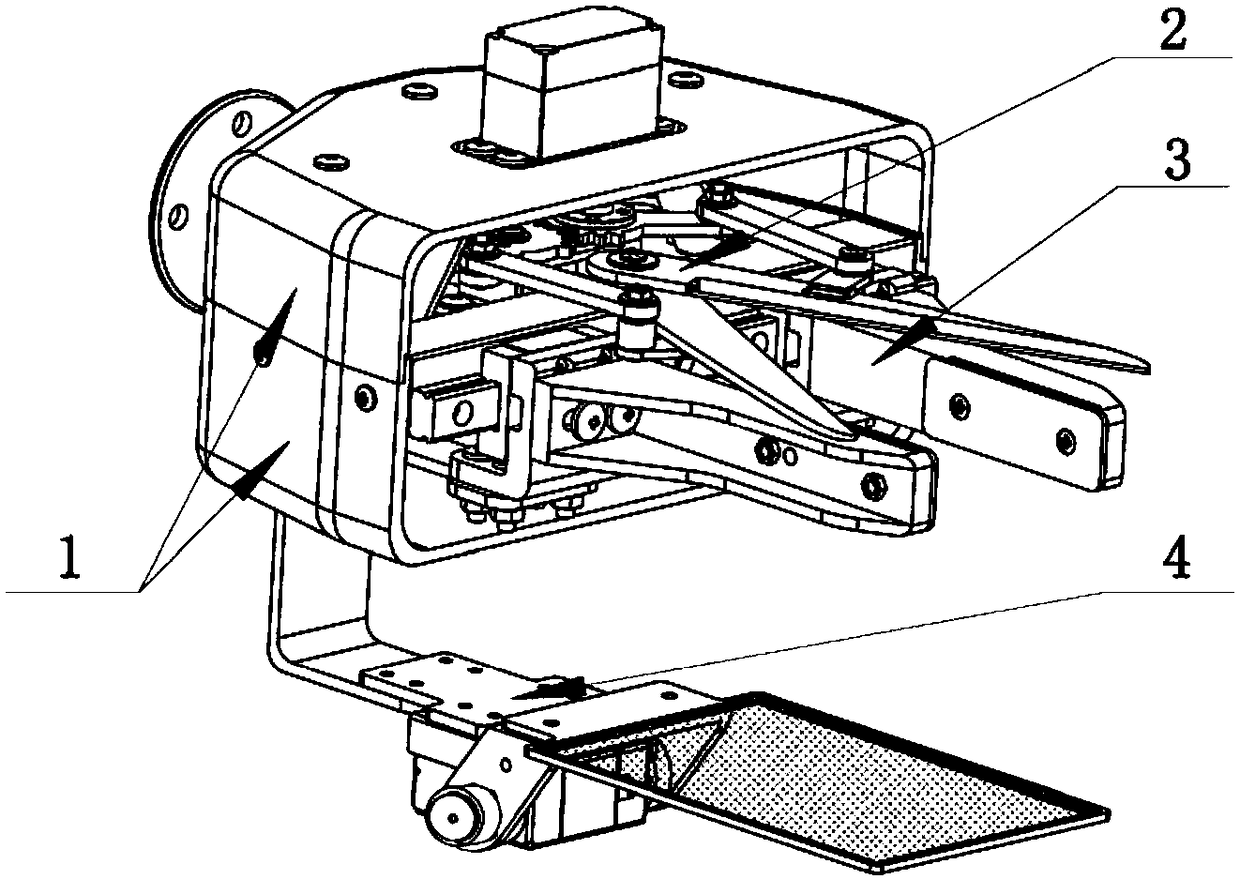
[0024] see Figure 1-Figure 4 , the end effector of the string-type fruit picking robot of the present invention includes a housing 1, a shearing mechanism 2, a clamping mechanism 3 and a lifting mechanism 4.
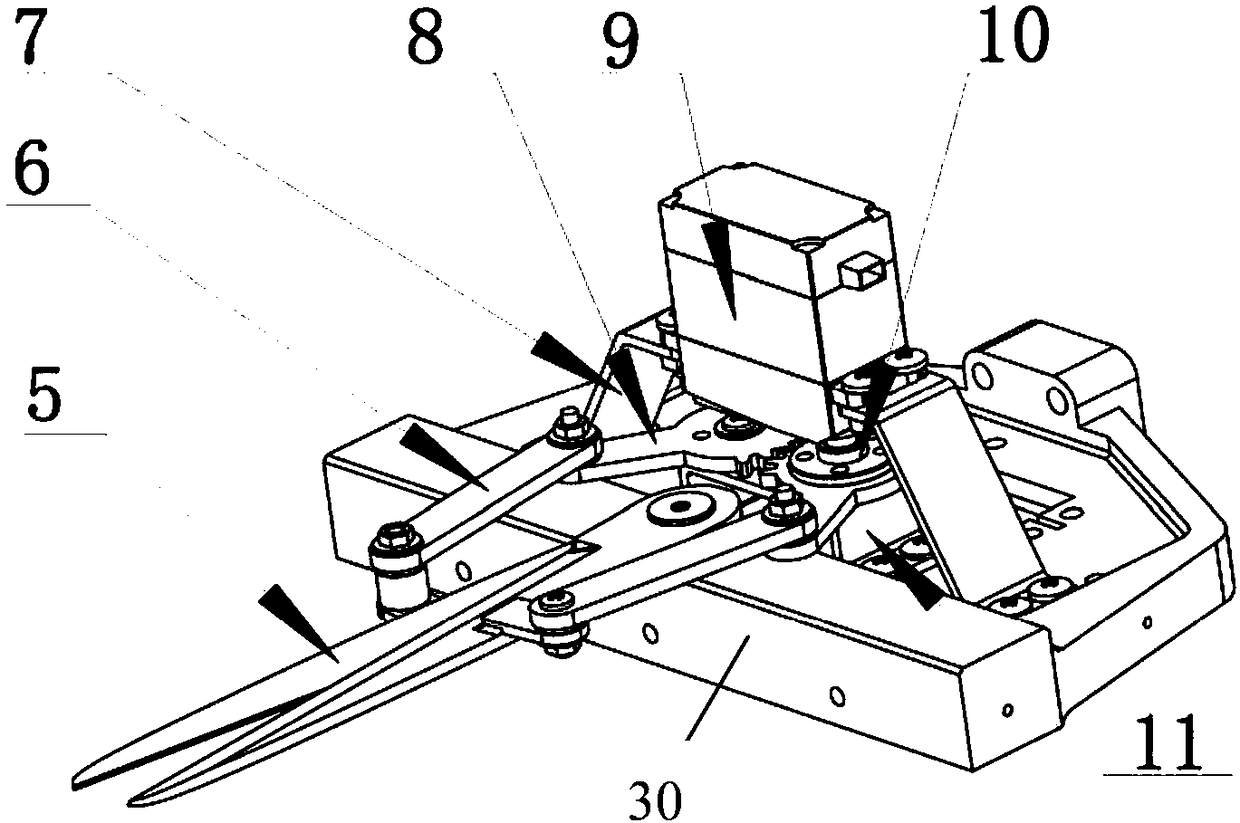
[0025] The shearing mechanism 2 includes a first base 30, a scissors support 11 installed on the first base 30, a pair of incomplete gear connectors 8 that are engaged with each other on the scissors support 11, and a pair of incomplete gear connectors 8 installed on an incomplete gear. The steering wheel 10 on the connecting piece 8, the shearing steering gear 9, the scissors body 5 and the pair of scissors connecting pieces 6 that are transmission connected with the steering wheel 10. The scissors body 5 is composed of a pair of moving blades, one end of the pair of moving blades is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More