

Unmanned ship navigational speed and navigational direction control method
A technology of course control and unmanned boat, which is applied in the field of speed and course control of unmanned boat
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] The present invention will be described in detail below with reference to the accompanying drawings.
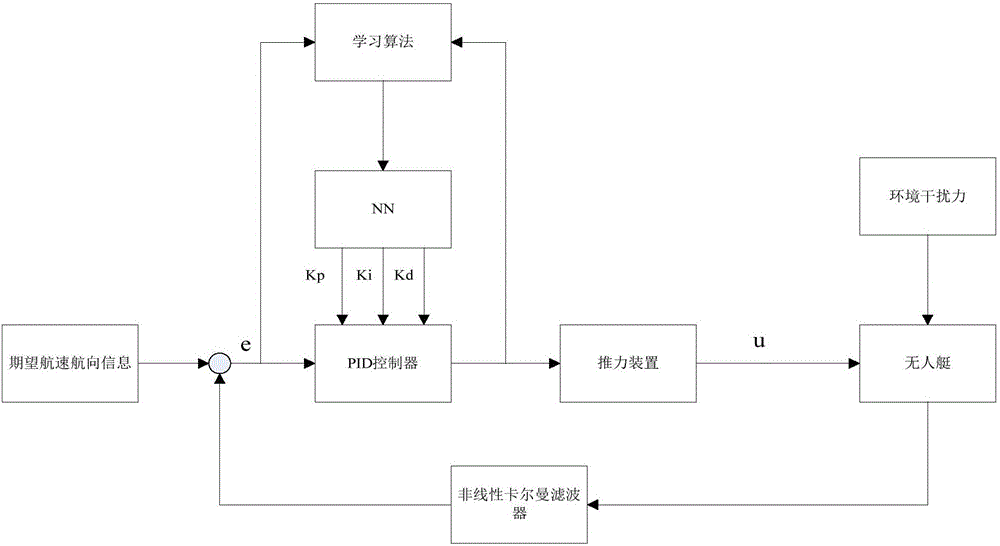
[0049] Step 1. Combining the motion model of the unmanned boat, using the principle of nonlinear Kalman filter, the nonlinear Kalman filter is used to filter out high-frequency interference and obtain the speed and heading information of the unmanned boat.
[0050] The speed and heading information of the optimized unmanned ship estimated by the adaptive nonlinear Kalman filter is sent to the adaptive nonlinear Kalman filter. The filter adopts the adaptive nonlinear Kalman filter algorithm to obtain the predicted value of the speed and course of the unmanned boat at the current moment, combined with the predicted value and measured value of the speed and course information of the unmanned boat at the current moment, the optimal estimation of the speed and course information at the current moment can be obtained value. In the process of updating the speed and course in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More