

Parallel robot device with two operation modes
An operation mode and robot technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems that are difficult to adapt to the requirements of multi-operation stations, the mechanism has not been well developed and applied, and the basic research is not perfect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technology of the present invention will be further described below by means of accompanying drawings and examples.
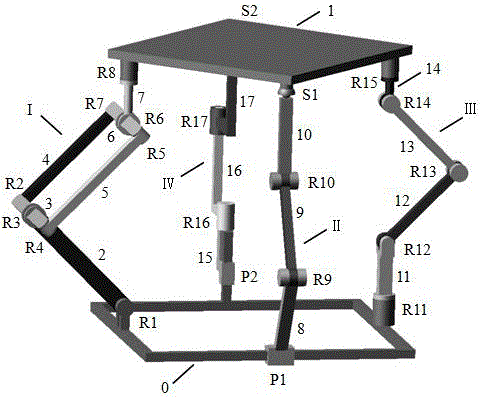
[0016] attached figure 1 The shown parallel mechanism can be one of the embodiments of the present invention, and its technical scheme is as follows: a parallel robot device with two operating modes, consisting of static platform 0, moving platform 1 and connecting dynamic platform 1, static platform The four branches of 0 (the branched chain, second branched chain, second branched chain Branched chain) composition, which is characterized by.
[0017] No. The branch chain is composed of a connecting rod, five connecting rods and eight rotating pairs, among which, the first One end of the connecting rod 1 on the branch chain is connected with the static platform 0 by the rotary pair R1, the other end of the connecting rod 2 is connected with the midpoint of the connecting rod 3 by the rotating pair 3 R3, and one end of the connecting rod ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More